De ORT Robotic Arm van Concorde Robotique in Cardiff werd in 1987 geproduceerd in Engeland. Ik kwam er eentje tegen op Marktplaats voor weinig en kon de verleiding niet weerstaan. De robot arm is in prima staat, de grijper ziet er wat ongeordend uit maar dat lijkt me oplosbaar. Alle andere assen draaien soepel. De robot arm kwam met een 12 V voeding en een 10-aderige flatcable. De aansturing kon nog wel eens een klusje worden. Over Concorde Robotique kan ik helemaal geen informatie vinden.

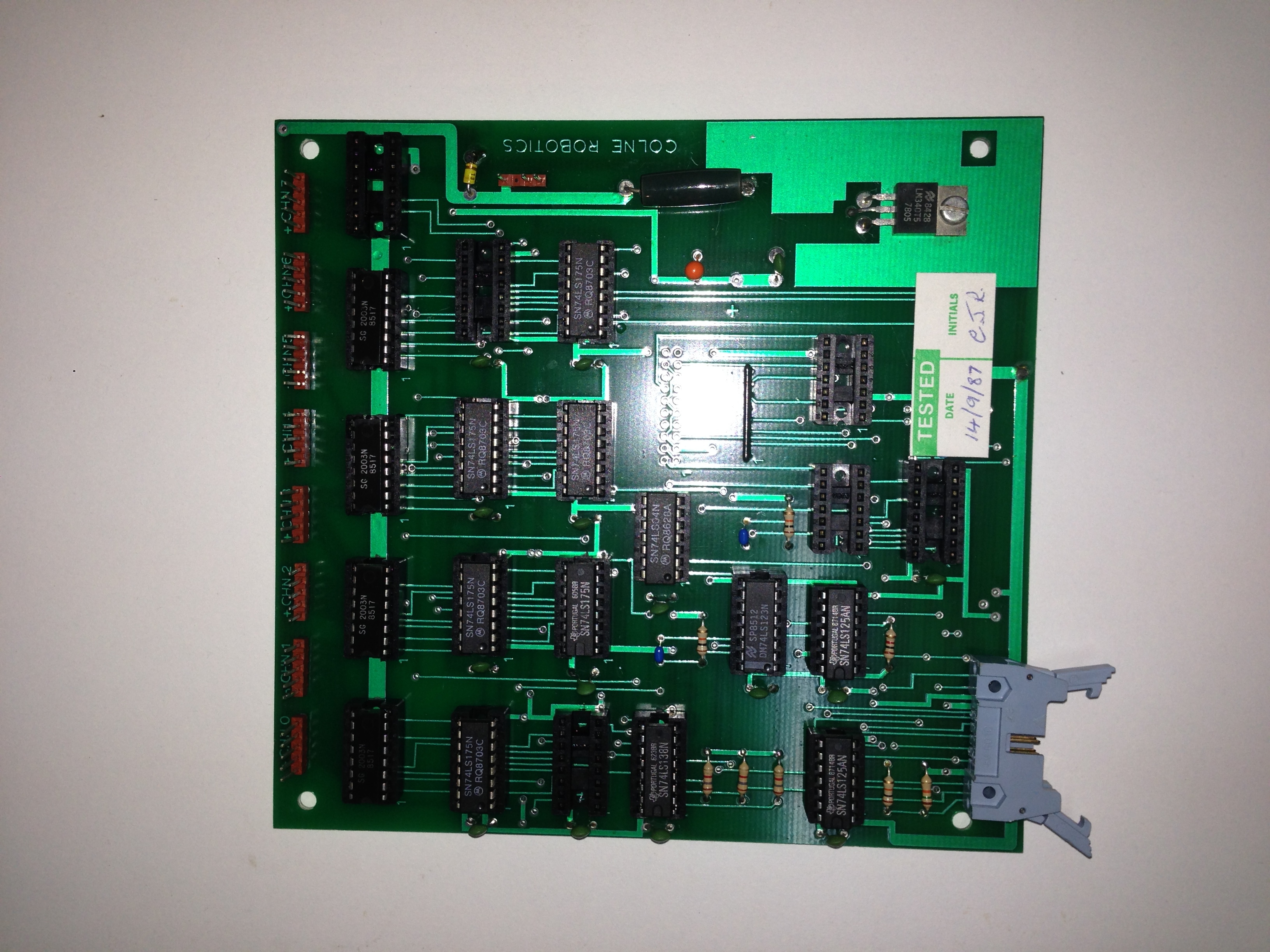

Deze blauwe robot arm heeft aan de binnenkant een printplaat van Colne Robotics en heeft onder de verflaag een oranjerode kleur. Misschien een grondlaag, maar mogelijk betreft het hier een overgespoten robot arm van het type Armdroid van Colne Robotics. Over Colne Robotics is heel veel informatie op het internet beschikbaar en de Armdroid robot armen van dit bedrijf lijken sprekend op deze blauwe, zij het dat ze oranjerood van kleur zijn.
Het elektrische deel van de robot arm bestaat uit zes uit de kluiten gewassen stappenmotoren, die op een printplaat zijn aangesloten, waarop zo op het eerste gezicht alleen enkele logische IC’s en een paar motordrivers zijn gemonteerd. Er is geen CPU en daarom zal de logische aansturing van buitenaf moeten komen, via de 10-aderige kabel. De printplaat bevat 15 verschillende IC’s, waarvan de meest voorkomende productiedatum week 3 in 1987 is. Hiernaast zijn er nog 5 lege IC-voeten.
Ik lees in het ETI magazine uit 1981, waar deze robot arm voor het eerst werd geïntroduceerd, dat er over de 10-aderige kabel zowel schakelaars kunnen worden ingelezen, als de zes stappenmotoren worden aangestuurd. Nu bevat deze ORT robot arm geen schakelaars, maar voor het bufferen van schakelaars zullen de lege IC-voeten voor zijn. Misschien valt er nog iets uit te breiden.
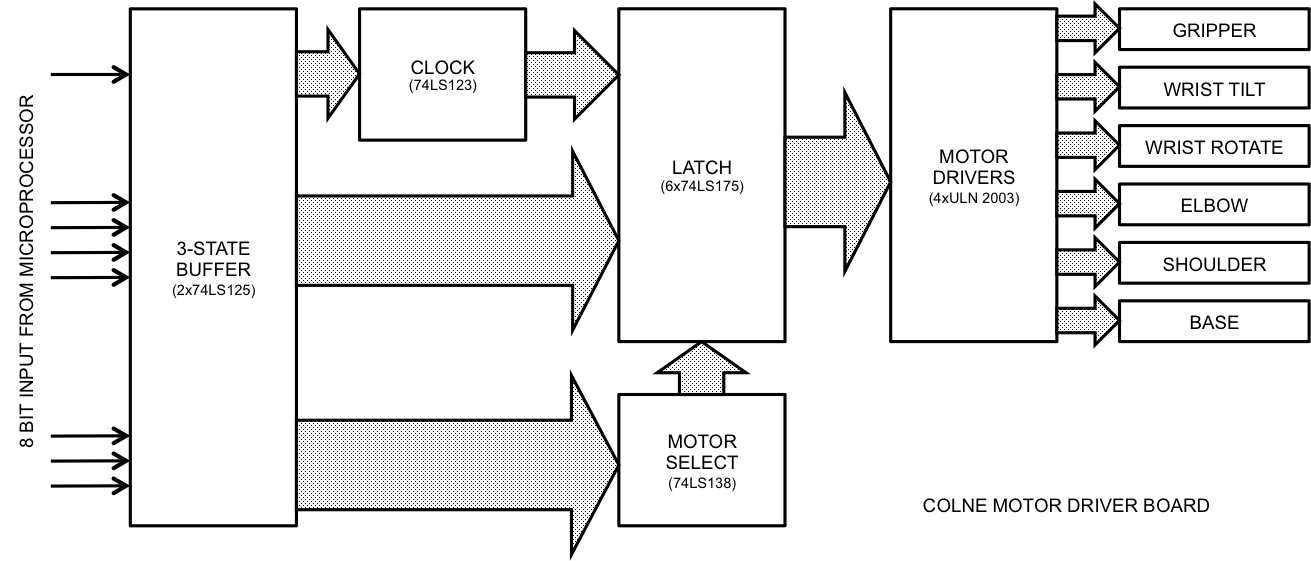
De aansturing van de stappenmotoren is heel low level: de signalen op de 10-aderige kabel bevatten 3 bits voor de selectie van een stappenmotor, 4 bits die gebruikt worden om de stappenmotor te laten draaien, een enable (of richting) bit en 2 voedingslijnen. Op basis van de beschikbare informatie heb ik de volgende schematische weergave opgesteld.
Om deze robot arm met bijvoorbeeld een Arduino of Raspberry Pi te besturen zal er een vertaling moeten plaatsvinden van één of andere vorm van commando (zoals ‘beweeg pols drie stappen omhoog’ of ‘beweeg pols naar positie x’) naar de low level besturing van de stappenmotoren (‘activeer spoel A en spoel B van motor 1’). Ik denk dat ik de commandostructuur leen van de CS-113, die hiervoor prima documentatie heeft. De Arduino moet dan de vertaling doen. Als ik dat eenmaal aan de praat heb, kan ik de Arduino uitbreiden met een toetsenbord of joystick.
- Richard Morris is een Armdroid van Colne Robotics aan het restaureren
- Technische handleiding van de Colne Robotics Armdroid robot arm
- Constructietekeningen van de Armdroid
- Lab-Volt Armdroid 1000 informatieblad
- Alex Zivanovic heeft een resourcepagina
- Armdroid in september 1981 ETI Magazine (PDF)
- Dan Kohn is met een Armdroid 1000 bezig
- Lab-Volt robot armen doen een balletuitvoering met een balletje (video)
- William gebruikt een Arduino Mega om motors te testen