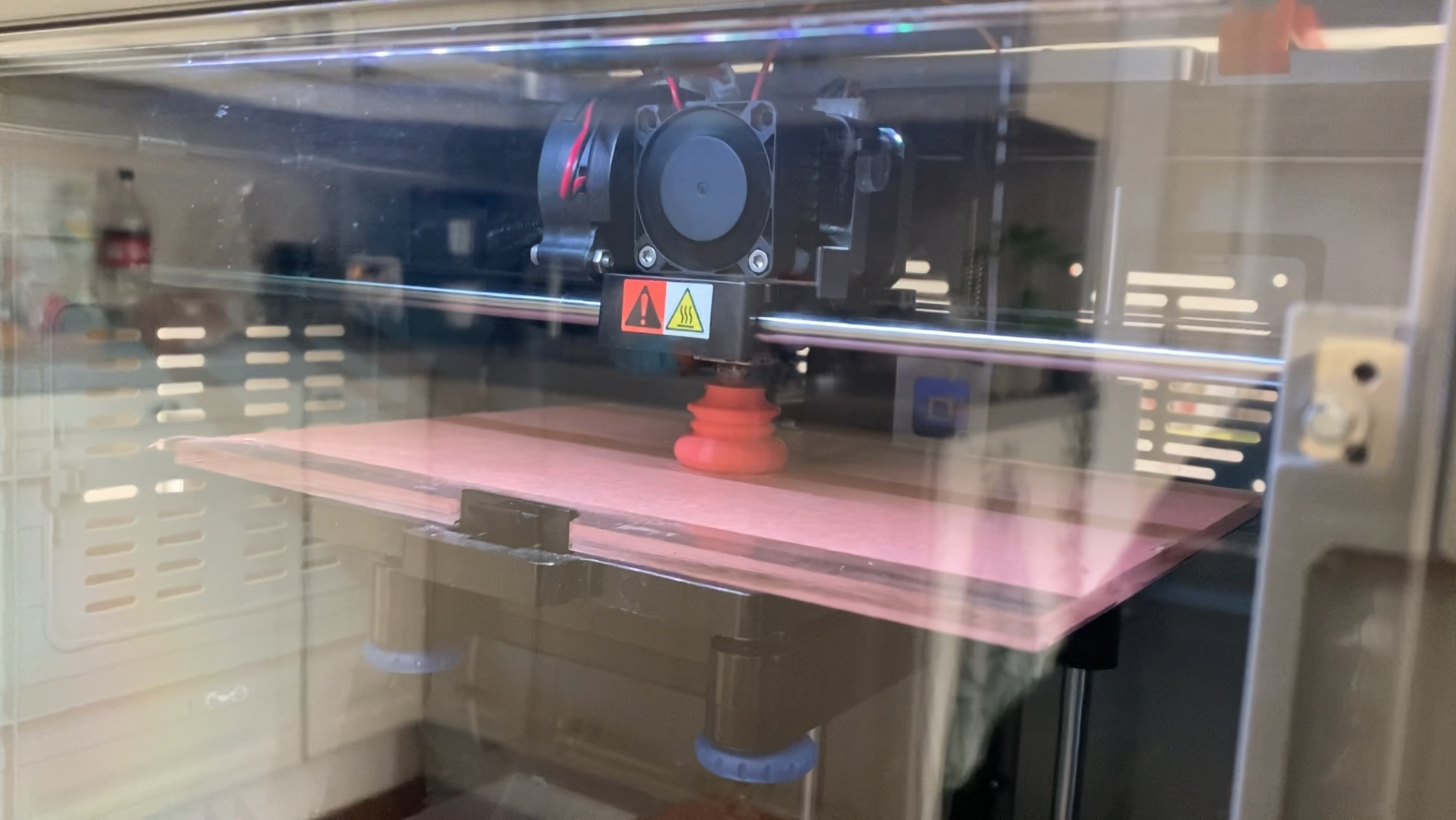
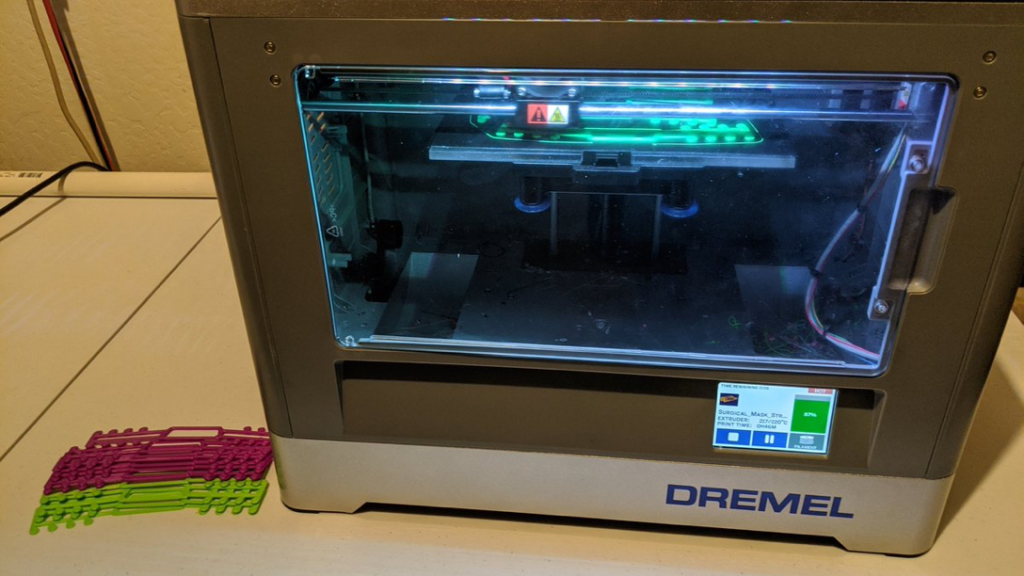
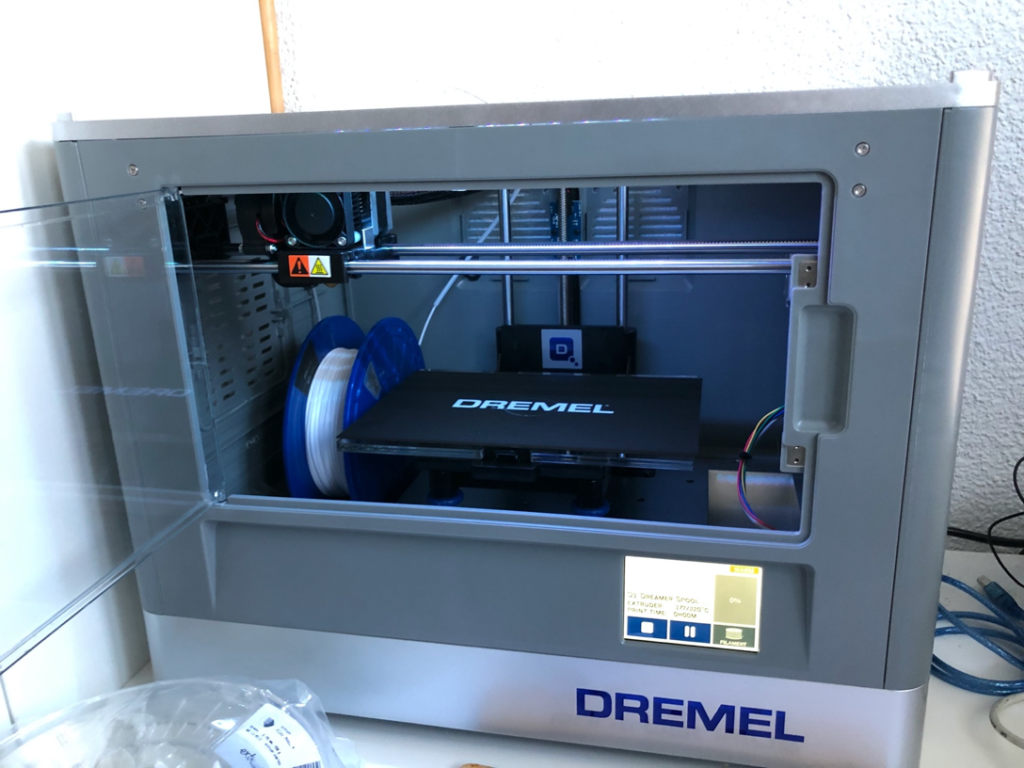
Door een speling in het lot (en een beetje hulp van Marktplaats) heb ik sinds kort de beschikking over een tweedehandse Dremel 3D printer, type ‘3D20 Idea Builder’. De vorige eigenaar was er op uitgekeken maar bezwoer dat er goede prints mee gemaakt konden worden. Hij kon zelfs de originele doos nog tevoorschijn halen en was bereid het geheel, printer in doos, naar Groningen te verschepen. En alas, de ruim 10 kilo zware doos werd bezorgd, opengemaakt, de printer aangesloten op een stopcontact en minuten later (inclusief een noodzakelijke reparatie) werd de eerste print geproduceerd. Met een prima resultaat!
Onderhoud
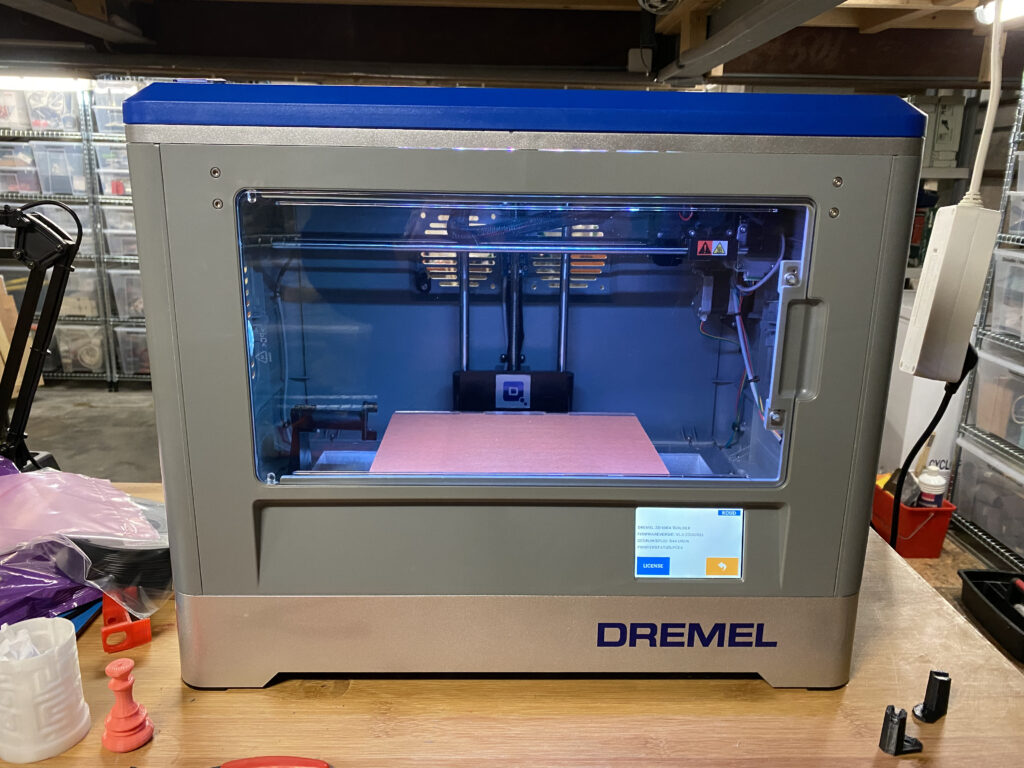
Ik heb deze Dremel 3D20 tweedehands in ‘gebruikte staat’ gekocht en dan weet je dat je aan de beurt bent als het gaat om de cosmetische en technische staat. Deze printer was vies, er was in het deksel gezaagd en bij het inschakelen liep de X-as vast tegen de zijwand. Dat was echter snel te fixen door een microschakelaar recht te buigen en de viezigheid was na een uurtje poetsen met wasbenzine en hygienedoekjes als sneeuw voor de zon verdwenen. De totale schade was een printplaatje met microschakelaar, een ontbrekende bout M3x12, een uitgezaagd deksel, een uitgewoond acryl bouwplatform, versleten rubbers onder het bouwplatform, een ontbrekende spoelhouder en een ontbrekend stukje teflonbuis. Niet getreurd, Dremel heeft een uitstekend serviceapparaat en de volgende dag kwam DPD een grote doos onderdelen van Robert Bosch (het moederbedrijf van Dremel) met reserveonderdelen brengen. Na de vervanging van versleten en defecte onderdelen ziet de printer er weer zo goed als nieuw uit!
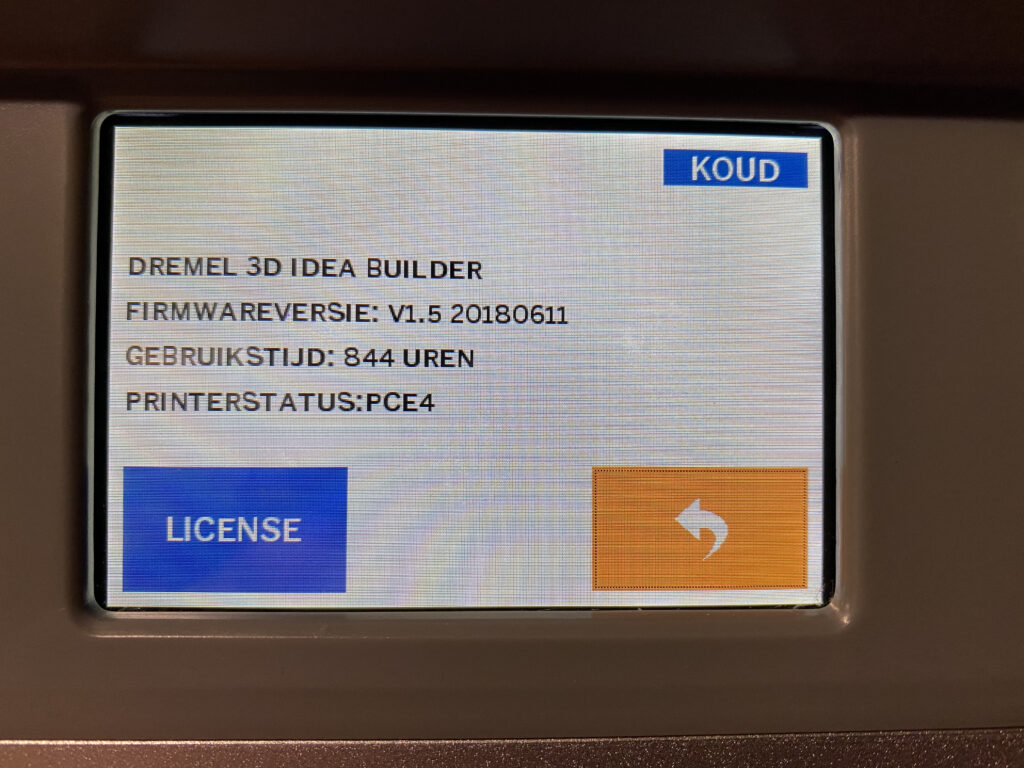
Serienummer 105Ruim 800 uur op de tellerWeinig beschadigingen
Deze Dremel 3D20 heeft als productiedatum mei 2015 en serienummer 105. Daarmee moet het wel één van de eerste 3D printers van Dremel zijn die van de productielijn zijn gerold. Omdat deze printer wereldwijd is verkocht, zal het aantal verkochte exemplaren in de tienduizenden of meer lopen en ‘nummer 105’ voelt dan enigszins speciaal. Met 844 printuren op de teller is de printer goed gebruikt geweest, maar anderen hebben in dezelfde tijd meer dan 4500 uur geprint en minder slijtage gehad, dus deze printer zit nog aan het begin van zijn technische levensduur. Alles lijkt inderdaad ook nog soepel, zij het allemaal wat lawaaierig door de grote holle kast, te werken.
Dremel DigiLab en Ultimaker Cura
De Dremel 3D20 accepteert zowel G-code als G3Drem bestanden. G-codes zijn van oudsher commando’s die door computergestuurde fabrikagemachines worden gelezen en waarmee bewegingen in de X, Y en Z-richtingen in de tijd worden ingesteld. Het G3Drem formaat is een extraatje waarmee ondermeer een schermafdruk meegezonden kan worden dat op het display kan worden getoond. Het Dremel DigiLab programma produceert G3Drem bestanden, maar wordt niet heel actief meer onderhouden door Dremel. Het programma is echter gebaseerd op (een oudere versie van) het open source programma Cura, dat tegenwoordig van Ultimaker is. Ultimaker Cura kan worden voorzien van een speciale Dremel plugin, zodat met een goedonderhouden en actueel programma kan worden gewerkt.
Dremel 3D20 gebruiksvoorbeelden
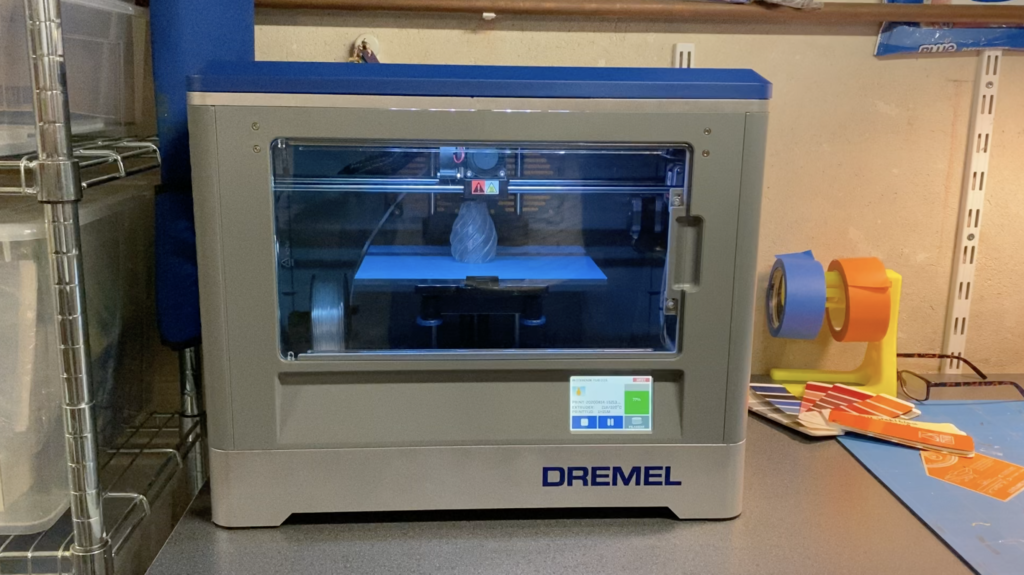
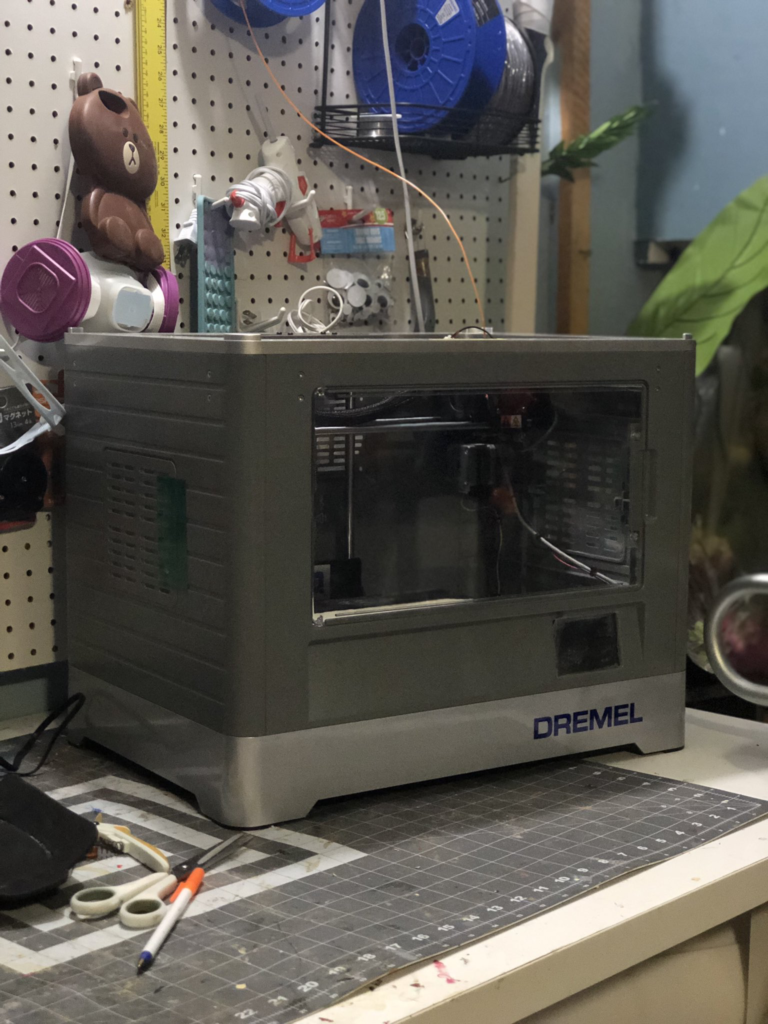
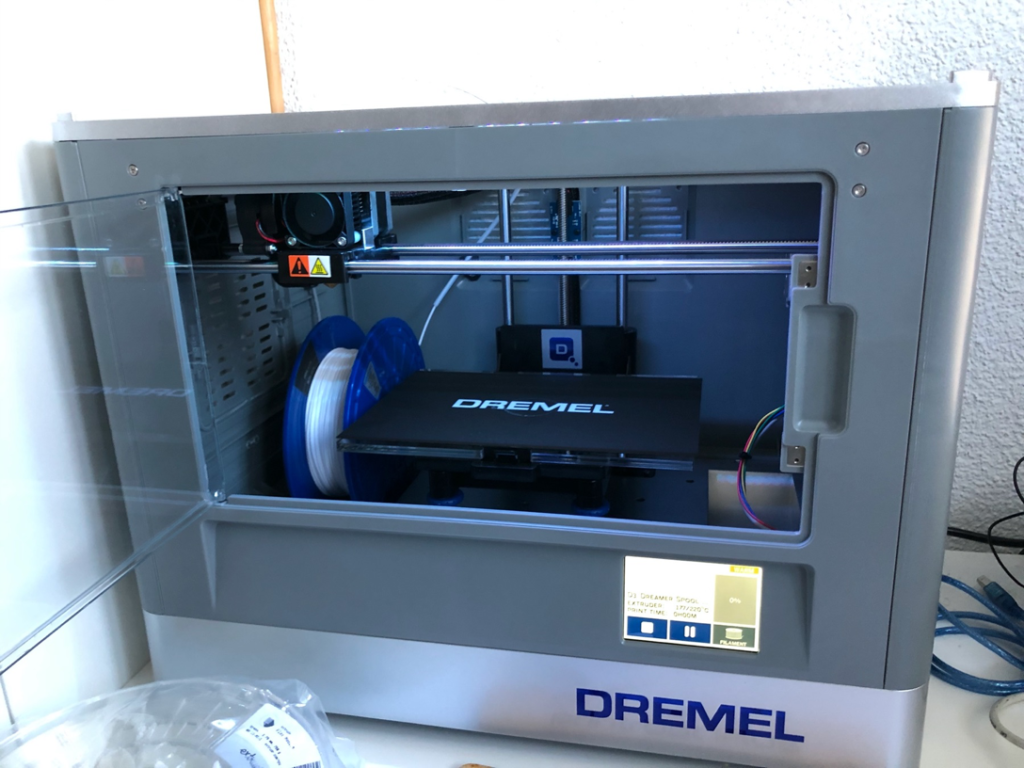
De uitstraling van de 3D20 maakt de printer goed gezelschap in verschillende omgevingen maar zelf heb ik ervoor gekozen om de printer in mijn werkplaats te stallen. De ruimte is onverwarmd en soms stoffig, maar de printer is hier beter op z’n plek dan in andere delen van het huis.
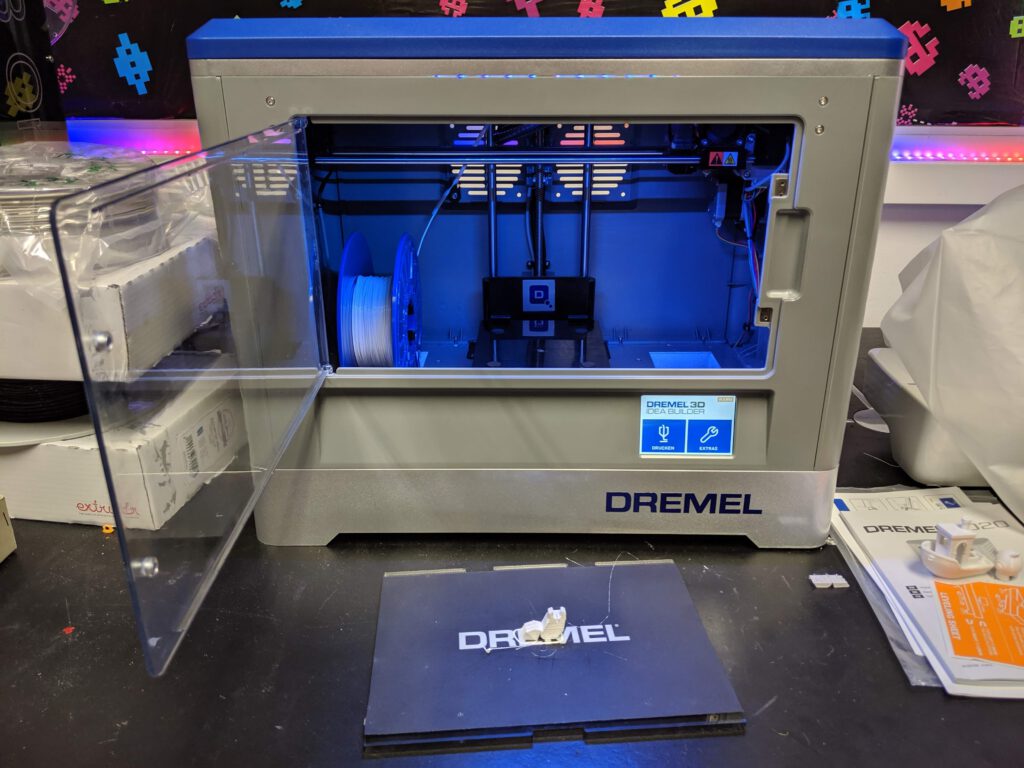
De 3D printer neemt een derde van het bureau inGoed excuus om eindelijk eens dat vaasje te printen
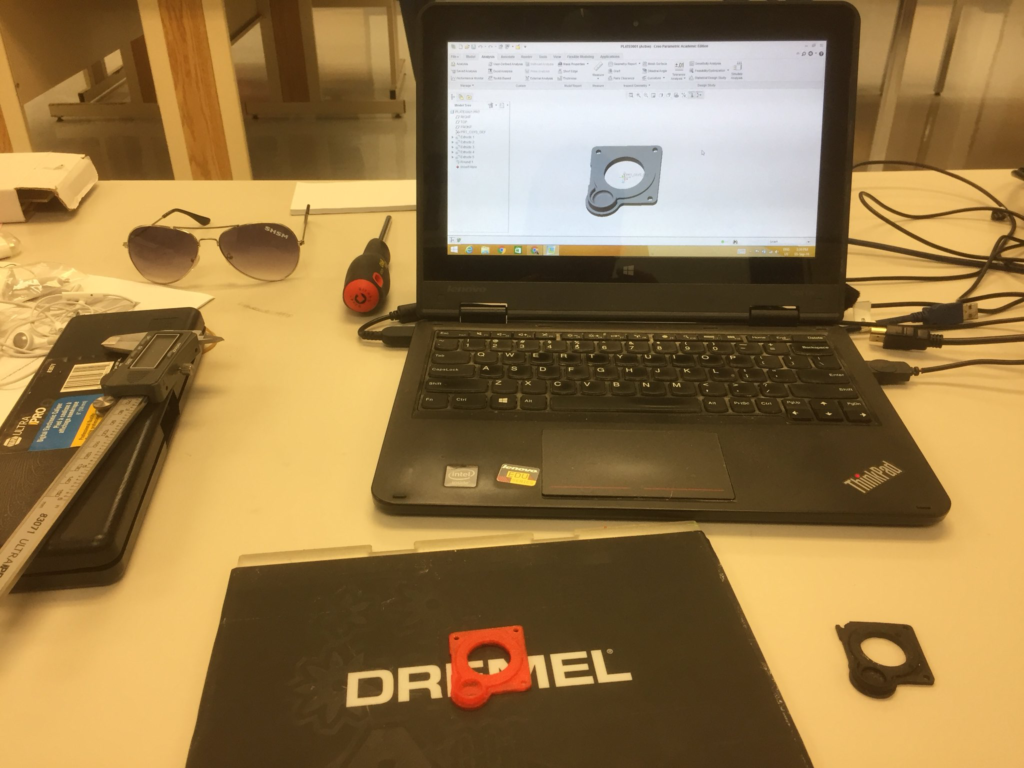
Ik was nieuwsgierig hoe andere Dremel 3D20 gebruikers met hun printer omgaan. Een zoektocht op Google leverde een mooi overzicht van deze printer in actie: het is een veelgebruikte printer voor mensen die niet zozeer 3D printen hun hobby willen maken, maar 3D printen aan hun bestaande hobbies willen toevoegen. Ook kom ik voorbeelden tegen van mensen die een 3D20 gebruiken als onderdeel van een productiestraat voor producten waarin 3D geprinte onderdelen zijn verwerkt, zoals spatmaskers en onderdelen voor gereedschappen.
Conclusie
Ondanks zijn leeftijd is deze Dremel 3D20 een goede koop gebleken. De Cura software is van hoge kwaliteit met veel instellingsmogelijkheden en het werkproces sleep – slice – store – start gaat snel en eenvoudig. Hoewel ik in het verleden al diverse 3D-printers in huis heb gehad, is deze Dremel Idea Builder 3D20 de beste van het stel. Enigszins lawaaierig is hij wel, hoewel een Dremel boormachientje altijd nog meer herrie produceert. Ik voorzie met de Dremel 3D20 dan ook nog jarenlang printplezier vanuit de werkplaats.
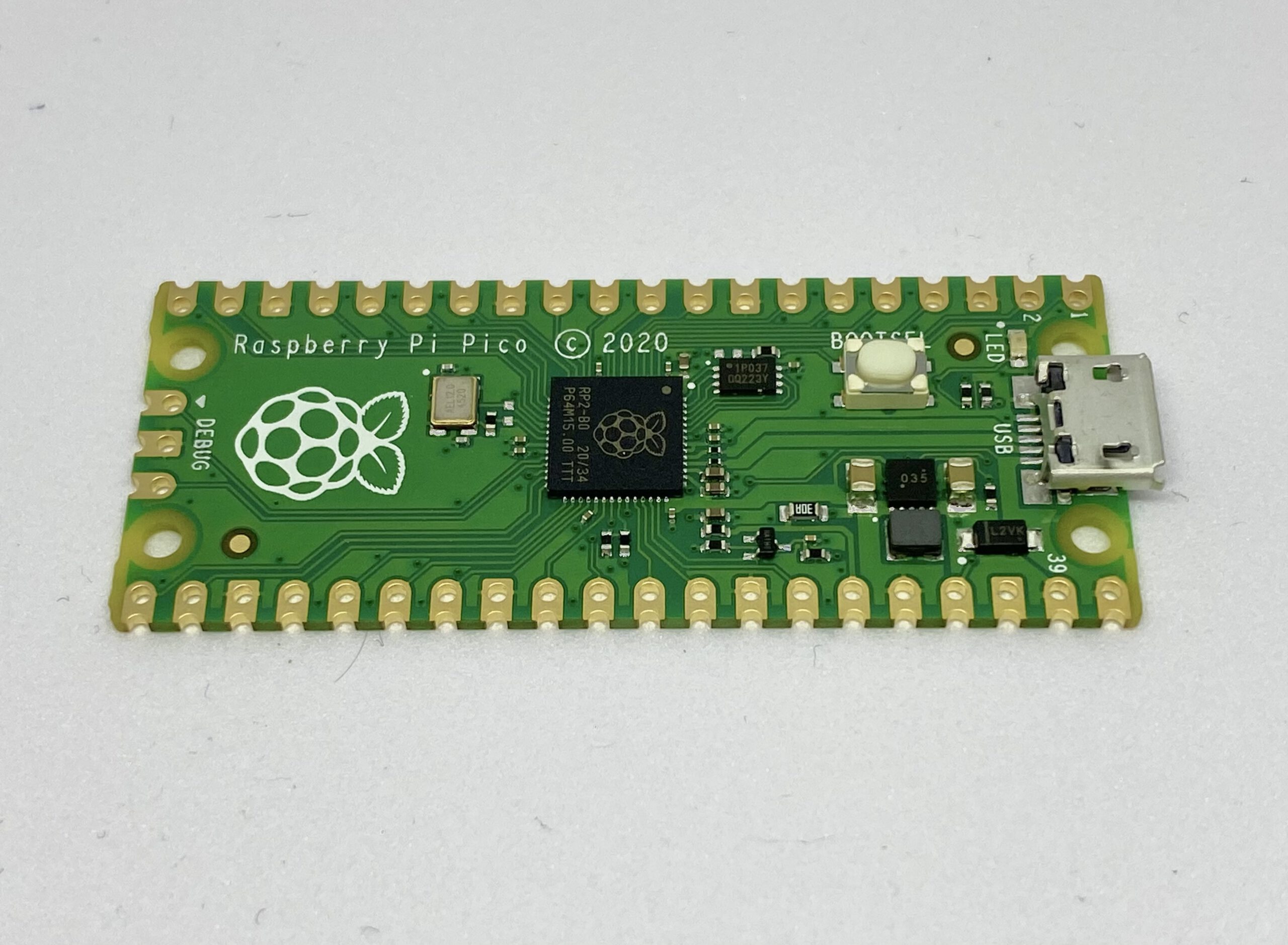
De Raspberry Pi Pico is een forse afdwaling van de gebruikelijke Raspberry Pi’s die we kennen: het heeft geen besturingssysteem zoals elk van de andere Raspberry Pi’s maar draait in plaats daarvan een enkel programma. De Pico is daarom meer vergelijkbaar met de functionaliteit van Arduino-gebaseerde besturingscomputers dan met de Linux computers uit de rest van de Raspberry Pi familie. De reden dat de Pico toch ‘Raspberry Pi’ heet is omdat dit de naam is van de organisatie die de Raspberry Pi computers heeft ontwikkeld. De naam is in dit geval echter geenszins een indicatie van de werking.
De Raspberry Pi Pico is klein en eenvoudig van opzet (foto Rudi Niemeijer)
Een belangrijkste argument voor de Raspberry Pi Pico is de prijs: met een gemiddelde verkoopprijs van € 6,95 (en nog goedkoper in bundels) is er weinig reden om nog op zoek te gaan naar Arduino klonen en compatibles. De overweging om een Raspberry Pi Pico in te zetten in plaats van bijvoorbeeld een Raspberry Pi Zero kan ook zijn dat de toepassing toch maar altijd één (Python) programma draait en het besturingssysteem van een Zero helemaal niet nodig heeft. Vele ingebedde toepassingen in alledaagse apparaten zullen zich hiervoor lenen.
De Raspberry Pi Pico wordt geprogrammeerd met een host computer zoals een Apple Macintosh, Windows computer of Linux computer. Met een code editor op één van deze computers wordt een programma in C/C++ (vergelijkbaar met Arduino’s Processing) of MicroPython (een Python implementatie voor microcontrollers) geschreven en met een druk op de knop op de Pico geladen. Als een programma eenmaal op de Pico is geladen dan blijft het daar draaien, ook als de Pico wordt uit- en weer aangezet, totdat het programma wordt overschreven door een nieuw programma.
Nieuwe hardware
De Raspberry Pi Pico is de eerste van een reeks van nieuwe besturingscomputers die gebruik maakt van de RP2040 chip. Vorige Raspberry Pi computers waren gebaseerd op een Broadcom implementatie van een ARM processor; de RP2040 is in huis ontwikkeld door het Raspberry Pi team en voorziet in een met twee processorkernen uitgeruste Cortex M0+ ARM implementatie op 133 MHz met 264 KB aan werkgeheugen en 2 MB aan flashgeheugen voor programma- en bestandsopslag. Programma’s en bestanden worden in het flashgeheugen bewaard ook als het geheugen niet meer van stroom wordt voorzien.
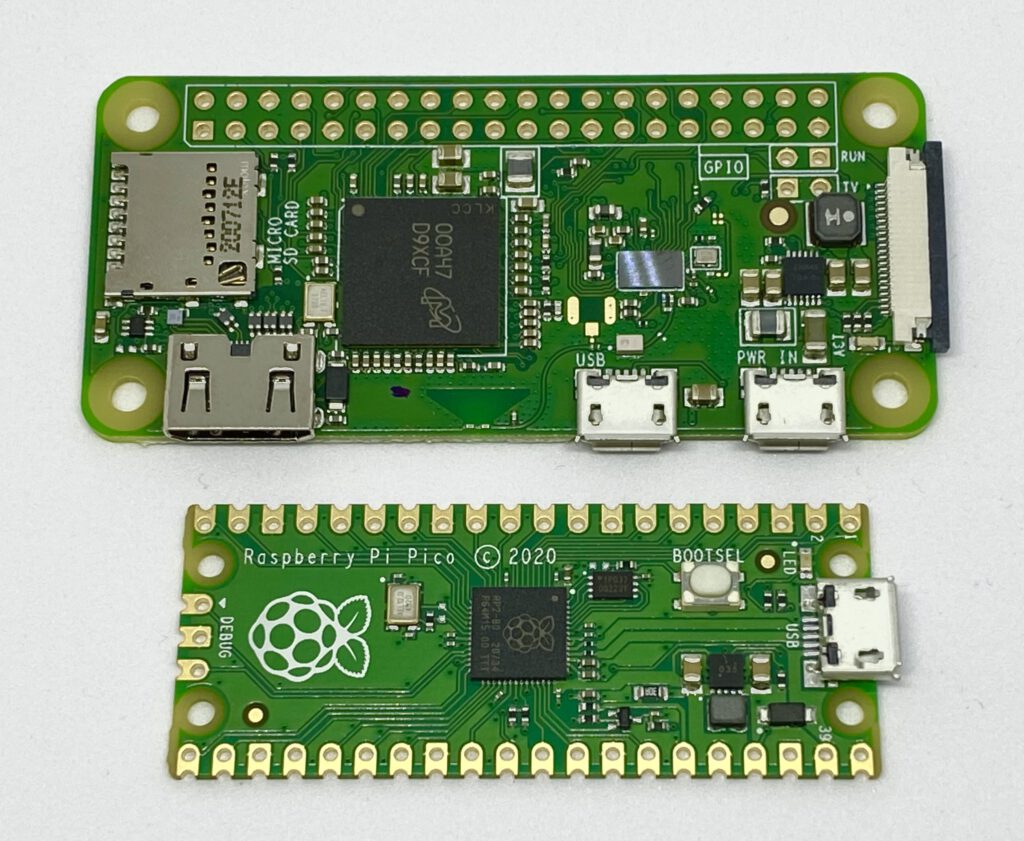
De Raspberry Pi Pico (onder) heeft geen besturingssysteem zoals de Raspberry Pi Zero W (boven) (foto Rudi Niemeijer)
De RP2040 is door de Raspberry Pi Foundation vrijgegeven voor gebruik en verkoop door derden en de chip gaan we onder andere zien op besturingscomputers van Adafruit, Pimoroni, SparkFun en Arduino. Wat specificaties betreft ligt de capaciteit van de RP2040 ruim onder die van de Raspberry Pi Zero’s 1 GHz ARM11 processor met enkele processorkern en het valt hierom niet te verwachten dat de RP2040 in de toekomst met een eigen Raspberry Pi OS wordt uitgerust.
Het grootste nadeel van de RP2040 is het gemis van draadloze connectiviteit, wat ervoor zorgt dat de Pico niet zonder extra voorzieningen in een internet of things toepassing kan worden gebruikt. Maar zowel op het gebied van uitbreidingen voor de Pico als op het gebied van doorontwikkeling op de RP2040 zijn veel initiatieven en een toekomstige versie van de RP2040 mét Bluetooth en WiFi ligt voor de hand.
Gebruik als besturingscomputer
De Raspberry Pi Pico is geen microcomputer met een eigen besturingssysteem, code editor of compiler. In plaats daarvan wordt een programma in een code editor op een andere computer geschreven en ‘geflasht’ op de Pico. ‘Flashen’ is overschrijven van het flashgeheugen van de Pico en wordt ook wel ‘branden’ genoemd, hoewel er geen vuur of rook aan te pas komt. Het schrijven van een programma kan bijvoorbeeld in de Thonny Python IDE op een andere Raspberry Pi (de Raspberry Pi 400 voldoet uitstekend voor het schrijven van programma’s) of met Microsoft Visual Studio Code op een macOS of Windows computer.
Er zijn veel verschillende besturingscomputers op de markt met veel verschillende eigenschappen (foto Rudi Niemeijer)
Programma’s voor de Pico kunnen worden geschreven in C/C++ zoals we bij Arduino zijn gewend, of in Python zoals we op de Raspberry Pi (en laten we wel zijn, op iedere andere computer) doen. Zowel in C/C++ als in MicroPython zijn verschillende codebibliotheken beschikbaar voor de hardwareuitbreidingen die op de markt worden gebracht. Zo is het eenvoudig om een led strip op de Pico aan te sluiten en met een passende codebibliotheek aan te sturen.
Ook AdaFruit heeft de nieuwe RP2040 microcontroller omarmd en er hun CircuitPython programmeertaal voor vrijgegeven. CircuitPython wordt door AdaFruit voor veel van hun eigen microcontrollerboards gebruikt en beschikt over een indrukwekkend arsenaal aan codevoorbeelden en -bibliotheken voor sensoren, LCD- en OLED schermen en andere randapparaten zoals kleurenledstrips en kassabon-printers. CodePython moet eerst op de RP2040 worden geflashd alvorens gebruik gemaakt kan worden van de AdaFruit codevoorbeelden, maar dit is een eenvoudig en omkeerbaar proces.
Python (en MicroPython) is een geïnterpreteerde programmeertaal dat op moment van uitvoering van tekst naar code wordt vertaald. Die vertaling vindt op de RP2040 plaats met de MicroPython of CircuitPython interpreter. Verwerking in C/C++ vereist een compileer-link stap die voor het flashen moet worden uitgevoerd op de computer waarop ook de code editor draait. Hiervoor dienen enkele stappen te worden uitgevoerd om het Pico programma te ‘bouwen’. De Microsoft Visual Studio Code omgeving doet dit automatisch en flasht dan ook gelijk het programma op de Pico. Arduino heeft al aangekondigd dat zijn ondersteuning voor de RP2040 gaan leveren zodat de RP2040 net als iedere andere Arduino kan worden geprogrammeerd.
Aansluitingen
De Raspberry Pi Pico heeft zoveel mogelijk van de aansluiting van de RP2040 naar buiten uitgevoerd, hetgeen de relatief grote printplaat verklaart. Beide zijden van de print zijn met 20 gaten met een standaard afstand uitgevoerd, maar is net wat breder dan een 40-pens IC. Halve maantjes zijn bij ieder aansluiting geplaatst om de printplaat eenvoudig in toepassingen te kunnen verwerken. Het is niet gegarandeerd dat de gehele opzet van de aansluitingen van de Pico in volgende besturingscomputers wordt overgenomen, hoewel dat (met de Arduino en de rest van de Raspberry Pi familie als voorbeeld) wel gebruikelijk is. Toekomstige besturingscomputers die op de RP2040 zijn gebaseerd zijn mogelijk (veel) kleiner en hebben minder (of meer) aansluitingen.
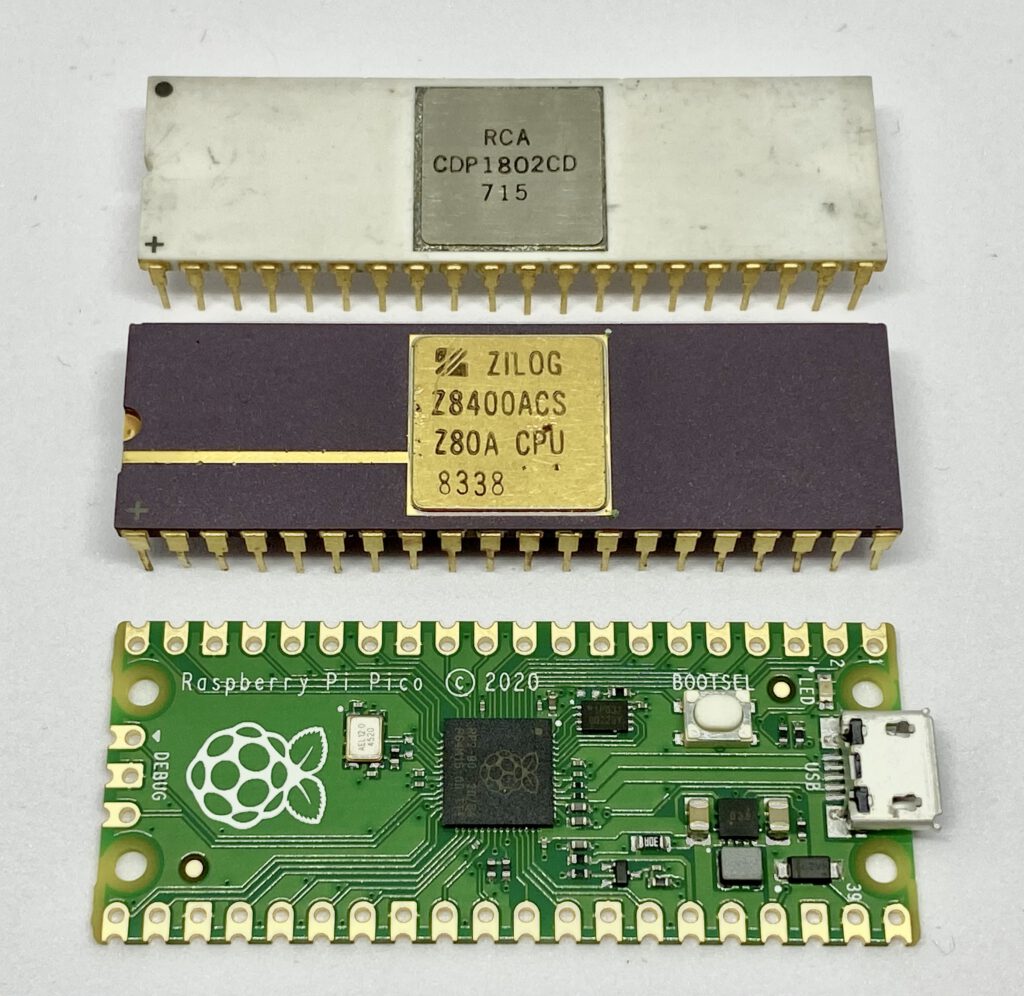
De Raspberry Pi Pico is even lang als een traditioneel 40-pens IC zoals hierboven afgebeeld, maar net even breder. De datumcodes van de 1802 en Z80 IC’s verklappen ‘week 15 1977’ (‘715’) en ‘week 38 1983’ (‘8338’). De Pico is hiermee 27 jaar recenter dan een Z80 en 43 jaar recenter dan de 1802. (foto Rudi Niemeijer)
Vooral de aansluitingen van de Pico maken duidelijk dat deze in andere toepassingsgebieden kan worden ingezet dan de andere leden van de Raspberry Pi familie. Deze zijn ook voorzien van verschillende mogelijkheden om sensoren in te lezen of actuatoren aan te sturen, maar hun mogelijkheden zijn beperkt in vergelijking met die van de Pico. De aanwezigheid van 3 analoge ingangen en in totaal 6 verschillende poorten voor seriële communicatie maakt al een groot verschil, maar het grote aantal GPIO en PWM aansluitingen is kenmerkend voor de Pico. De aansluitingen van de Pico zijn wat vergelijkbaar met die van een Arduino:
Pen functie
Arduino Uno
Raspberry Pi Pico
Analoge ingang
6 (10 bits)
3 (12 bits)
Generiek I/O (GPIO)
14
26
Seriële communicatie via SPI
1
2
Seriële communicatie via I2C/TWI
1
2
Pulsbreedtemodulatie (PWM)
5
16
Overige aansluitingen
3 hardware interrupts, 1 seriële poort
8 toestandsmachines, 2 seriële poorten
Aansluitingen van Arduino en Raspberry Pi Pico vergeleken
Van een afstandje lijkt de Raspberry Pi Pico op een vervanger van de Arduino, maar dat is niet het geval. ‘Arduino’ is een ecosysteem dat bestaat uit een archetype ontwikkelsysteem ter grootte van een bankpas met gestandaardiseerde aansluitingen, een microcontroller met een Arduino bootloader en een ontwikkelomgeving waarin programma’s in de programmeertaal ‘Processing’ worden geschreven. De oorspronkelijke microcontroller voor Arduino’s was een Atmel ATmega328, maar microcontrollers van veel andere fabrikanten kunnen in het Arduino ecosysteem worden gebruikt. De populaire Espressif ESP32 microcontroller met ingebouwde WiFi wordt bijvoorbeeld veel ‘met Arduino’ geprogrammeerd. De Arduino organisatie heeft een samenwerking met de Raspberry Pi Foundation aangekondigd zodat de RP2040 microcontroller en hiermee de Raspberry Pi Pico, vanuit de Arduino ontwikkelomgeving kunnen worden geprogrammeerd.
De Raspberry Pi Pico is een duidelijke tegenhanger voor de Arduino creditcard besturingscomputer (boven), met vergelijkbare aansluitingen (foto Rudi Niemeijer)
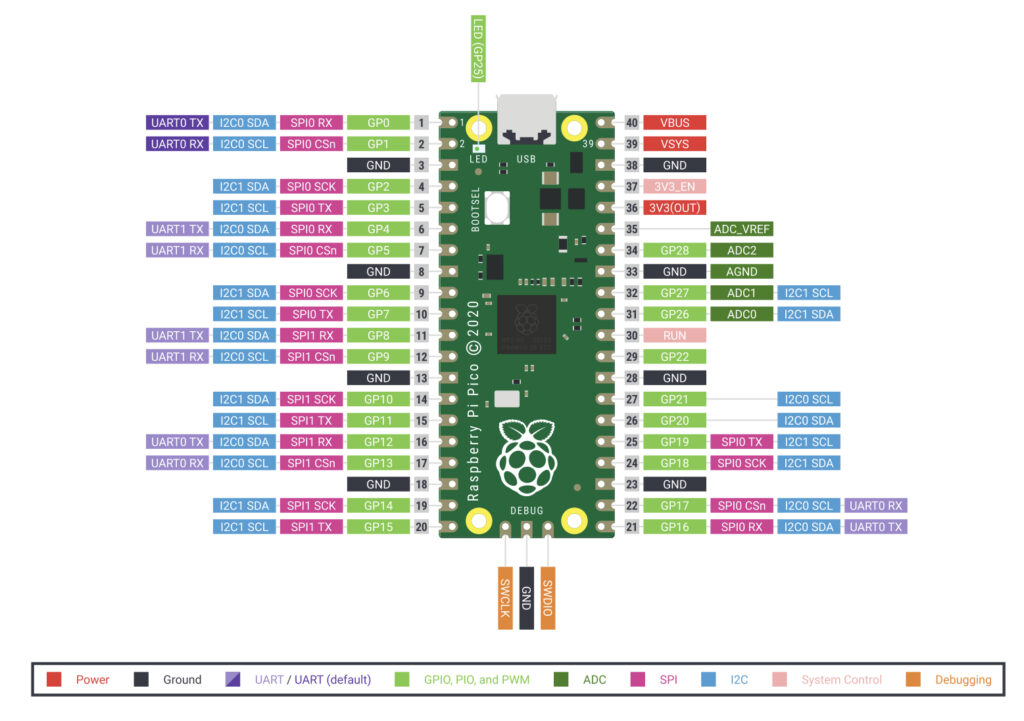
De GPIO aansluitingen zijn bedoeld als digitale ingang of uitgang en kunnen worden gebruikt met andere digitale schakelingen. Zo kan met een GPIO als ingang de stand van een schakelaar worden ingelezen of een relais worden aangestuurd. De SPI, I2C en UART aansluitingen kunnen worden gebruikt om de communicatie tussen microcontrollers, sensoren, actuatoren of andere apparaten te verzorgen. Met de analoge ingangen kunnen nauwkeurige metingen worden uitgevoerd van analoge spanningen, die tussen 0 en 3,3V mogen liggen. De PWM worden gebruikt voor puslbreedtemodulatie, zoals het regelen van de helderheid van een led of de snelheid van een elektromotor. PWM wordt ook gebruikt voor eenvoudige audio en het aansturen van servo’s.
Aansluitingen van de Raspberry Pi Pico (illustratie Raspberry Pi Foundation)
Programmeren van de Raspberry Pi Pico
De Raspberry Pi Pico wordt in C/C++ of in MicroPython geprogrammeerd. Het programma wordt geschreven op een host computer, zoals een Raspberry Pi 400 of andere Linux computer, een Windows computer of een macOS computer. Wanneer de Raspberry Pi Pico via de ISB aansluiting op de computer wordt aangesloten en de bootsel knop ingedrukt wordt gehouden dan gaat de Raspberry Pi Pico in ‘opslagmedium modus’. Het gevolg is dat een bestaand programma op de Pico niet wordt uitgevoerd, maar dat in plaats daarvan het bootsel programma wordt uitgevoerd, dat een USB opslagmedium apparaat nabootst. Een extra schijfstation is nu op de host computer beschikbaar. Het geschreven programma wordt hierop gekopieerd, waarna de Raspberry Pi Pico automatisch herstart en het nieuwe programma gaat uitvoeren.
Toen IBM in 1981 met de IBM PC op de markt kwam, maakte deze gebruik van de toen 2 jaar oude Intel 8088 microprocessor. Deze processor was in grote getale beschikbaar en had, mede door het volume waarin IBM de processoren afnam, een prima prijs. De processor presteerde niet alleen beter dan de in 1976 geïntroduceerde en op de eerdere Intel 8008 gebaseerde Zilog Z80, maar Intel had ook plannen voor een 16- en zelfs 32-bit groeipad. En hoewel vele van de honderden home computers in die tijd met een Z80 werkten duurde het niet lang voordat de markt overspoeld werd met IBM-compatible PC’s, die allemaal waren uitgerust met een Intel 8088 microprocessor. Het leek niet stuk te kunnen voor Intel: niet alleen bracht de verkoop van de 8088 processor veel geld in het laatje, de markt was ook rijp voor de nieuwe processorlijnen van Intel en nam iedere innovatie op dat gebied gretig af.
Vanuit Japan schoof NEC echter een spaak tussen de wielen. In 1982 bracht het directe kopieën van de Intel 8088 op de markt onder het typenummer NEC uPD 8088. Intel sleepte NEC voor de rechter, maar voor deze uitspraak kon doen besloot NEC bakzijl te halen en Intel voor een licentie op het ontwerp van de microprocessor te gaan betalen. De licentiekosten maakten het voor NEC oninteressant om de uPD 8088 te blijven produceren, maar toch gaf het de pijp niet aan Maarten. In eind 1984 kwam NEC met de V20 op de markt die volledig pin- en softwareware compatible was met de Intel 8088 en in 1985 stonden Intel en NEC tegenover elkaar voor de rechter. Het resultaat van de uitspraak was echter, door Intel’s eigen toedoen, niet in hun voordeel en NEC mocht de V20 blijven verkopen. Een varrassende uitspraak, omdat je zou verwachten dat een processorarchitectuur niet zomaar gekopieerd zou mogen worden.
Het is belangrijk te weten dat een microprocessor niets anders is dan een grote elektronische schakeling met vele tienduizenden transistoren, weerstanden en condensatoren. Het woord micro komt uit de tijd dat processoren nog werden opgebouwd uit losse onderdelen op grote printplaten. Bij een microprocessor zijn alle onderdelen (voornamelijk transistoren en weerstanden) op een enkele glasplaat gedampt en geëtst. Processoren (en microprocessoren) bestaan voor het grootste deel uit logische poorten, zogenaamde gates. Deze logische poorten vormen de bouwblokken voor geheugenbits en registers, schuifregisters, rekenblokken en tellers. Een enkele poort is opgebouwd uit drie transistoren en voor een geheugenbit zijn vier poorten nodig; 12 transistoren. Voor een 8-bits optel- en aftrek rekenblok zijn ruim 200 poorten nodig; 600 transistoren. De Intel 8088 heeft op deze manier 29.000 transistoren (en bijna 13.000 weerstanden) in gebruik. Het elektronisch schema hiervan hield Intel angstvallig geheim, maar iedereen met voldoende middelen kon een Intel 8088 kopen, de behuizing openen en met een elektronenmicroscoop het chipontwerp bestuderen: de opbouw van de microprocessor was, voldoende ingezoomd, voor iedereen zichtbaar.
Intel 8088 microprocessor zoals gezien onder een microscoop
Het zien van de elektronische schakeling, met hoeveel details dan ook, was één, het doorgronden van de werking was een ander. Gelukkig voor NEC had Intel daar een handboek voor gepubliceerd: de Intel 8088 User Manual. Het handboek beschreef, in veel detail, het precieze gebruik van de microprocessor. Niet alleen werd beschreven, welke elektrische signalen op de processor aangeboden moesten worden, maar ook op welke manier deze signalen elkaar moesten opvolgen en welke resultaten dat opleverde. Het bevatte een detailbeschrijving van het gedrag van de Intel 8088 microprocessor, gegeven bepaalde ingangssignalen.
Het handboek bevatte een opsomming van deze signalen, stroomschema’s voor het gebruik ervan, toepassingvoorbeelden en lange lijsten van mnemonics: afkortingen voor elk van de mogelijke functies van de microprocessor, zoals DEC (verminder een intern gebufferd resultaat met 1) en INC (vermeerder een intern gebufferd resultaat met 1). Deze functielijst wordt de instructieset van de microprocessor genoemd. Iedere microprocessor heeft een eigen instructieset waarmee assembleerprogramma’s kunnen worden samengesteld: programma’s die steeds per 8 bits elektrische signalen aan de processor worden aangeboden, waardoor de transistoren van de microprocessor een bepaalde stand innemen, de logische poorten van waarde veranderen en de microprocessor een instructie ‘uitvoert’.
De ingenieurs van NEC namen kennis van de instructieset zoals Intel die had gepubliceerd, bekeken de schakeling van de Intel 8088 via een microscoop, maakten een eigen schakelschema (want een logische poort kan op verschillende manieren worden ontworpen) en doopten dit nieuwe ontwerp ‘NEC V20’: de tweede versie van NEC. De NEC V20 had een eigen schakelschema, maar had aan de buitenkant dezelfde signaalingangen en verwerkte alle instructies van de Intel 8088 op precies dezelfde manier. Een Intel 8088 kon door een eindgebruiker uit de chipvoet worden gehaald en vervangen worden door een precies eender uitziende NEC V20 en direct genieten van de iets hogere verwerkingssnelheid.
De rechter oordeelde in 1982 dat NEC geen inbreuk maakte op het schakelschema van Intel, omdat NEC iedere schakeling op haar eigen manier had opgezet, voldoende afwijkend van de Intel 8088. De rechter oordeelde verder dat het kopiëren van de precieze verwerking van de signalen, de mnemonics en de instructieset, wel inbreuk had kunnen zijn op de intellectueel eigendom van Intel, ware het niet dat Intel was vergeten hierop in voldoende mate ‘Copyright Intel’ te vermelden. Had Intel op deugdelijke wijze ‘Copyright Intel’ bij de in handboeken gepubliceerde instructieset opgenomen dan had de rechter bepaald dat NEC geen gebruik mocht maken van de instructieset. En met deze uitspraak werd het voor NEC mogelijk de V20 zonder verdere licentieovereenkomsten met Intel op de markt te brengen. Een dure vergissing van Intel, een fout die chipbouwers in het algemeen en Intel in het bijzonder niet weer zouden maken.
De volledige instructieset van de Intel 8088 kwam met deze uitspraak in het publiek domein te liggen. Ook werd er een nieuw woord aan het ‘handboek van de cloner’ toegevoegd, namelijk ‘reverse engineering’: de manier om van een schakeling de werking af te leiden en een eigen implementatie ervan te maken.
De uitspraak van de rechter heeft ervoor gezorgd dat ieder bedrijf dat een microprocessor met een eigen instructieset ontwikkelt deze aan alle kanten patenteert en auteursrechtelijk beschermt. En zo komen we op de ARM processoren van het van oorsprong Engelse bedrijf ARM Holdings Ltd. ARM levert zowel licenties voor gebruik van de instructieset, als voor gebruik van het ontwerp van de processoren.
Apple heeft in de jaren ’90 een licentie genomen op de instructieset en een bepaalde periode gebruik gemaakt van de ARM processorontwerp. Apple maakt nog steeds gebruik van de instructieset, en heeft hiervoor naar verluid een eeuwigdurende licentie, maar heeft ondertussen een eigen onderwerp voor de processoren die buiten de licenties van ARM ligt. Apple heeft daarom de vrijheid om processoren, die Apple de A-reeks noemt, naar hun eigen inzicht te ontwerpen en te gebruiken. Mogelijk heeft Apple ook het recht om de instructieset naar eigen wens aan te passen en uit te breiden. Dat laatste zou betekenen dat de compatibiliteit met de ARM processoren van ARM Holding niet langer is gegarandeerd, maar dat zal Apple niet veel kunnen schelen.
De SOEKS 112 is een Geiger-Müller dosimeter in een handzame verpakking die niet heel veel groter is dan de Russische SBM20 telbuis waar het apparaat omheen gebouwd is. De keus voor deze telbuis is positief opvallend: er zijn veel kleinere op de markt, maar de SBM20 is de meest gerespecteerde. De stroomverzorging met twee knoopcellenvan het type LR44 is evenzeer bijzonder, gezien het feit dat de telbuis 290 volt hoogspanning nodig heeft om z’n werk te doen.
De SBM20
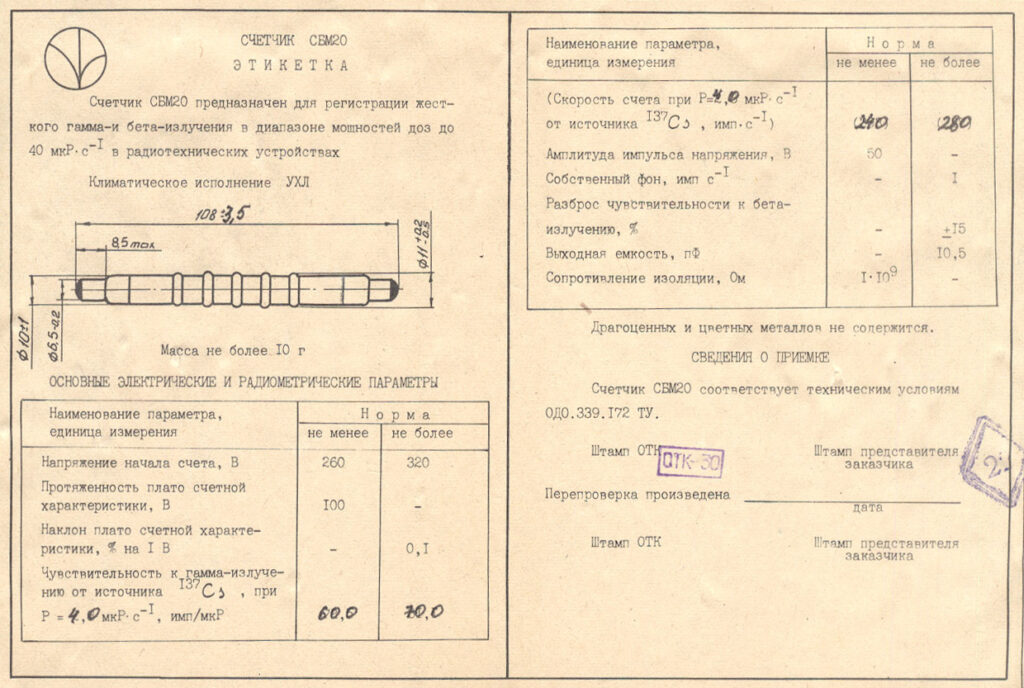
Een Geiger-Müller telbuis is een cylinder gevuld met een gasmengsel met een lage druk van ongeveer 0,1 atmosfeer. De cylinder bevat twee elektrodes, waartussen een spanning van enkele honderden volts wordt aangebracht. De wanden van de cylinder zijn van metaal, of gemetaliseerd glas. Ioniserende straling zorgt voor een gasontlading in de telbuis, die resulteert in een klik! van de geigerteller waar de buis in is gemonteerd. Nergens in de wereld worden zoveel geigertellers gemaakt als in de voormalige Sovjetunie. De SBM20 telbuis is dan ook van Russische makelij. Veel van deze telbuizen zijn afkomstig uit militaire voorraden en hebben productiedata tussen 1947 en 1991, de periode van De Koude Oorlog. De SBM-20 is een degelijke telbuis die gevoelig is voor alfa-, beta- en gammastraling. De aanbevolen werkspanning is 290 volt en levert dan 20 CPM (‘ontladingen per minuut’) in een neutrale omgeving op.
Datasheet van de Russische SBM-20 Gieger-Müller telbuis. Meer dan 290 volt hoogspanning heeft de buis niet nodig.
Volgens de specificaties heeft de SOEKS 112 een SBM20-1 telbuis. Dat is een variant op de SBM20 die iets korter is en asymetrisch is van vorm. De feitelijke telbuis is hetzelfde; alleen de donkerrode kunststof aansluiting is bij de SBM-1 aan één kant niet gemonteerd.
SBM20 Geiger-Müller telbuis (onder) en SBM20-1 asymetrische variant (boven)
De omrekening van ‘ontladingen per minuut’ (CPM) naar een dosis in µSv/h gaat rechttoe-rechtaan met een omrekenfactor die voor iedere telbuis verschillend is, maar een eenvoudige deling betreft, zoals ‘gedeeld door 150’.
Evolutie in hoogspanningscircuits
Velleman K2645 Geiger Counter Kit uit 1997
Mijn eerste kennismaking met geigertellers was de Velleman K2645 kit uit 1997: een bouwpakket van een geigerteller met een miniatuur telbuis en een piezo pieper. De 9 volt batterij liet de schakeling maandenlang piepen en het luide signaal zorgde er meestal voor dat de batterij eerder losgekoppeld was dan hij leeg was.
Een Eagle LT44 transformator werd aan de secundaire kant gevoed met een puls vanuit de pulsgenerator die was opgebouwd rondom de CD40106 (Schmidt-trigger inverters) en CD4093 (Schmidt-trigger NAND-poorten) IC’s en de twee transistoren T1 en T2 die beurtelings ten opzichte van de nul geleidden, waardoor aan de primaire kant een wisselspanning ontstond van ongeveer 150 volt. Deze werd vervolgens twee keer verdubbeld met een tweevoudig uitgevoerde Cockcroft-Walton spanningsverdubbelaar, bestaande uit 8 condensatoren en diodes, tot een spanning van ongeveer 600 volt. Met een enkelzijdige gelijkrichting en een buffercondenstator ontstond een gelijkspanning voldoende groot voor de telbuis.
In modernere schakelingen is de transformator vervangen door een enkele spoel en wordt de spanning omhooggezwiept tot een pulserende gelijkspanning. De buffering hiervan is ook eenvoudiger van opzet. De stroomopname van het hoogspanningsdeel van de schakeling is evenredig met het aantal ‘klikken’ dat de telbuis geeft: iedere ontlading heeft een kleine stroomopname tot gevolg. De feitelijke voedingsspaning is daarbij nog niet eens van zo’n grote invloed. Veel schakelingen maken gebruik van een 9 volt batterij, maar ook 3,7 volt Li-Ion accu’s worden gebruikt en, in het geval van de SOEKS 112, 3 volt aan knoopcellen.
De SOEKS 112 heeft een printplaat die niet veel groter is dan de telbuis. Op de printplaat zien we de batterijaansluitingen, een LC-display, twee drukknoppen en een handvol SMD-onderdelen.
SOEKS 112 opengewerkte behuizing: de twee delen van de behuizing omsluiten een SBM20-1 telbuis met hierboven een printplaat
Plastic container met uraniumerts voor testdoeleinden
Radiactiviteit is ioniserende straling dat door een materiaal wordt uitgezonden. Het kan gaan om natuurlijk radiactief verval, straling afkomstig van materialen uit de ruimte, bodem of bouwmaterialen. Radioactviteit is ook het gevolg van kernsplijting in kerncentrales en de hierbij gebruikte materialen en afvalstoffen. De hoeveelheid gemeten radioactiviteit kan veranderen bij atmosferische omstandigheden, transport van radioactief materiaal of ongevallen bij kerncentrales. De menselijke zintuigen nemen geen radioactiviteit waar; om ioniserende straling te meten is een meetapparaat nodig dat is voorzien van een Geiger-Müller type telbuis.
De hoeveelheid ioniserende straling wordt gemeten met een stralingsdetector. In deze stralingsdetector zit een buis gevuld met een gas, de zogenaamde Geiger-Müller telbuis. De buis heeft een anode en kathode, waarop een hoge spanning is aangebracht. Als straling door de buis passeert zal het gas even geïoniseerd worden en zal er korte tijd een elektrisch stroompje lopen. Dit stroompje kan worden gebruikt om een luidspreker aan te sturen (“klik!“) of als basis voor een telschakeling gebruikt worden. Zo’n telschakeling kan bestaan uit een display, of een datalogger waarmee de hoeveelheid gemeten radioactiviteit voor langere tijd kan worden verzameld.
Franzis’ Geigerzähler van Klaus Wilk (1983)
De gebruikte GM-telbuis is bepalend voor de gevoeligheid voor ioniserende straling. Er zijn verschillende soorten GM-telbuizen op de markt, die allemaal op een andere manier reageren op radioactiviteit. De ene buis is gevoeliger voor lagere hoeveelheden straling, de andere buis juist voor grotere hoeveelheden. De ene buis is kritisch over de aangeboden anode-kathodespanning, de andere veel minder. De ene verzadigt sneller dan de andere. Een heel aardig boek dat de volledige theorie over Geiger-Müller-telbuizen combineert met verschillende gebruiksvoorbeelden is Geigerzähler van Klaus Wilk, dat in 1983 bij Franzis’ verscheen. Hoewel het boek niet gemakkelijk in de boekhandel is te krijgen, is het de moeite om ervoor op jacht te gaan. Ik maak er gebruik van sinds mijn eerste geigerteller, de Velleman K2645.
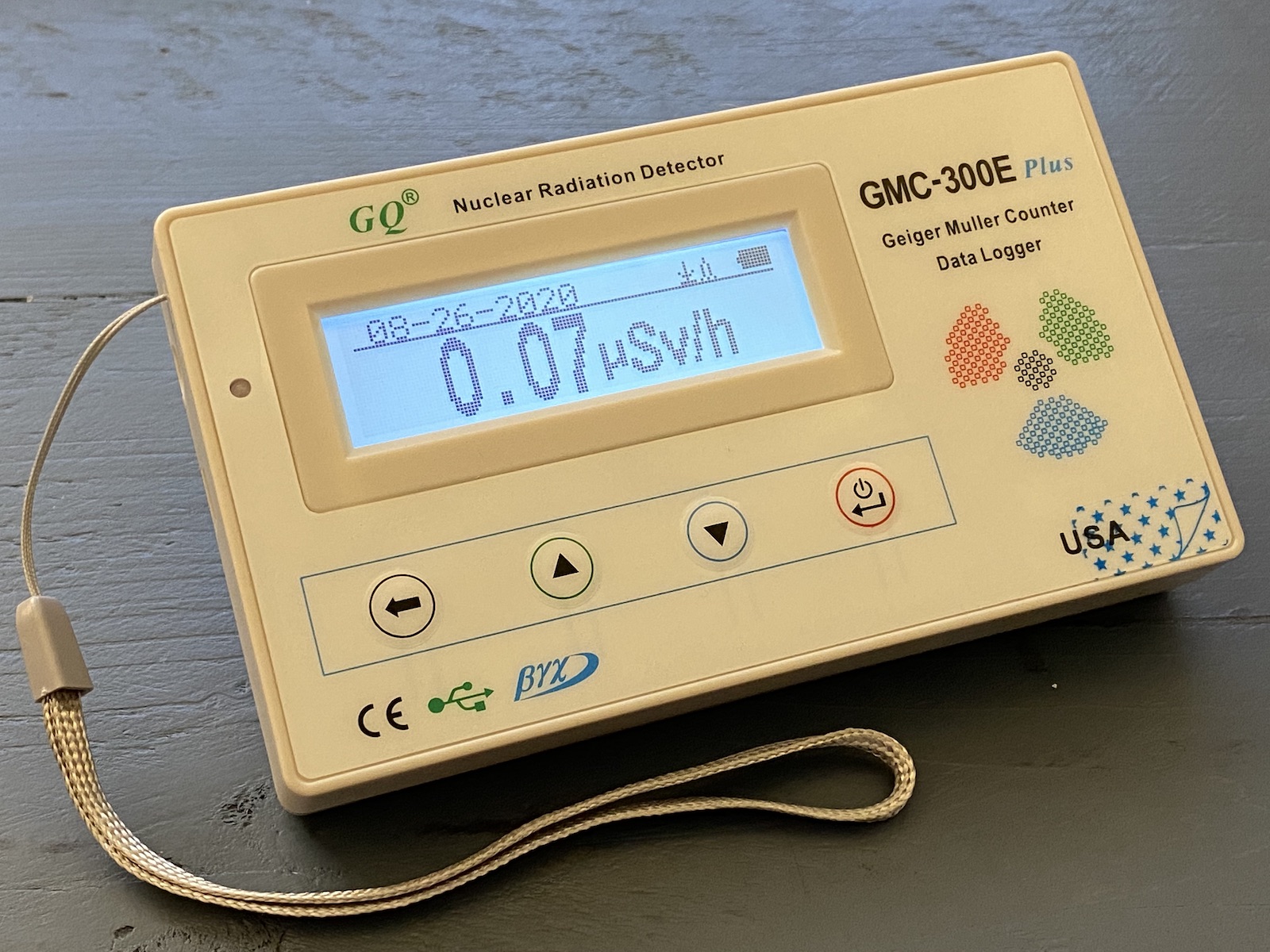
Bij de GMC-300E Plus is de keus voor de telbuis gevallen op een M4011 GM-telbuis van moderne Chinese makelij. De GMC-300E Plus komt in een vrolijk gekleurde verpakking en vormt daarmee een vriendelijke kennismaking met het meten van radioactiviteit. Voor een prijs van iets over de 80 euro kun je niet echt een buil vallen aan het apparaat, dat in verschillende vergelijkende warenonderzoeken prima resultaten opleverde.
De metingen van de GMC-300E Plus zijn gebaseerd op de gasontladingen van de M4011 Geiger-Müller telbuis. Deze M4011 staat bekend om zijn gevoeligheid zowel voor radioactiviteit als zichtbaar licht. De buis moet daarom tegen daglicht beschermd worden om valse metingen te voorkomen. Een klein circuit, dat bestaat uit transistor V6, spoel L1, diode D4 en condensator C1, zorgt voor de buisspanning van ongeveer 400 volt. De hiervoor benodigde hoogfrequent klokpuls is afkomstig uit de microcontroller U9. Op de printplaat zijn verder de volgende geïntegreerde circuits te herkennen:
De GMC-300E Plus heeft een enkelzijdige printplaat met een nette rangschikking van de elektronische onderdelen
U2 en U3 lijken gebruikt te worden om de telpulsen van de GM-buis te ontstoren en te bufferen. Dat voelt een beetje overdreven, over-engineered, maar zal de kwaliteit van de telling ten goede komen. De printplaat lijkt zowel geschikt te zijn voor het gebruik van Li-Ion accu’s alsook vaste batterijen, getuige zowel U6 als U7. Met U7 zou een spanning van 9 volt teruggebracht kunnen worden tot 3,3 volt. Het ontbreken van een hoogfrequentgenerator is interessant en de voor de hoogspanning benodigde frequentie zal in software opgewekt moeten worden. Om de hoogspanning in software aan te kunnen sturen heeft ook wel wat.
De GMC-300E Plus is voorzien van een monochroom grafisch display en vier drukknoppen die op de behuizing onder het display zijn gemonteerd. De software toont de actuele meetwaarden (telpulsen per seconde) op het scherm. De GMC-300E Plus toont het aantal telpulsen als CPM, counts per minute. Omdat het aantal pulsen per soort telbuis verschilt, rekent de GMC-300E Plus deze pulsen via een omrekenfactor om naar μSv/h, mRem/h en MeV. Een alarmniveau voor wanneer de gemeten waarde een bepaalde instelbare drempel overschrijdt is instelbaar voor CPM, μSv/h en mRem/h. Naast de gemeten waarde kan ook een maximum (pulsen per minuut), gemiddelde of totaal (dosimeter) worden weergegeven. De gemeten waarden kunnen ook in een eenvoudige grafiek met een tijdschaal van 60 seconden op het display worden getoond. Maar dat is een functie die beter met de bewaarde gegevens van de datalogger kan worden uitgevoerd.
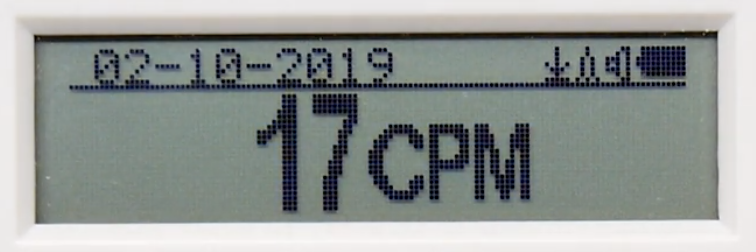
Het display van de GMC-300E. Getoond wordt de datum, datalogger aan, alarmwaarde ingesteld, geluid aan, volle batterij en 17 ‘Counts Per Minute’.
De datalogger bewaart gegevens iedere seconde, minuut of uur. Per gegeven wordt datum en tijd vastgelegd. Het 64K EEPROM geheugen wordt als ringbuffer toegepast, zodat aan het eind van het geheugen de begindata wordt overschreven. Op zich is deze keus wel prima, meestal ben je meer geïnteresseerd in recente data dan in oudere data. Het is echter iets om rekening mee te houden als je langdurige metingen wilt doen: een meting per uur is dan aan te bevelen.
Radioactive straling is voor veel mensen een huiverig begrip, dat geassocieerd wordt met kerncentrales en kanker. Het is belangrijk je te realiseren dat:
Er alfa-, beta- en gammastraling is. Alfastraling wordt gemakkelijk tegengehouden, bijvoorbeeld door papier. Betastraling wordt tegengehouden door metaal, bijvoorbeeld aluminiumfolie. Gammastraling wordt slechts door dikke lagen beton tegengehouden. Bij alle vormen van straling geldt dat de intensiviteit kwadratisch afneemt met de afstand tot de bron;
De hoeveelheid straling die een bron afgeeft wordt uitgedrukt in becquerel (Bq);
De hoeveelheid straling waaraan een mens in een bepaalde periode is blootgesteld wordt uitgedrukt in sieverts (Sv);
De omrekening van Bq naar Sv afhankelijk is van afstand, afscherming, soort straling en manier van blootstelling;
Stralingsziekte pas kan plaatsvinden bij een dosis van een paar sievert (dus een paar duizend millisievert);
Radioactieve straling in de natuur voorkomt in hoeveelheden waar het menselijk lichaam aan gewend is en in Nederland ongeveer 2,5 mSv/jaar (2,5 millisievert per jaar) is;
Radioactiviteit door de lucht kan worden getransporteerd in de vorm van een stofwolk (de Tjernobyl kernramp werd in 1986 ontdekt doordat Zweedse onderzoekers een radioactieve wolk ontdekten);
Indien radioactiviteit in stof en water snel voldoende kan worden verdund (bijvoorbeeld in de zee, of doordat een stofwolk over zee wordt getransporteerd en in een regenbui terecht komt) dit automatisch tot reductie tot veilige hoeveelheden leidt.
In de basis is de GMC-300E Plus een geigerteller: de pulsen van de M4011 telbuis worden opgeteld en gedeeld door het aantal minuten dat werd gemeten en levert dan een waarde in CPM. Een vaste omrekeningsfactor voor de telbuis levert de dosiswaarde in mSv/h op. De gemeten waarden worden op een display getoond en afgeleide functies zoals instelbaar alarm, dataopslag en historgram maken het geheel af. Spannend is dat allemaal niet, maar de GMC-300E levert een keurig pakket af dat voor verschillende doeleinden kan worden ingezet. Wat natuurlijk de vraag oproept wat die doeleinden zoal kunnen zijn.
Radioactiviteit en radioactieve straling is altijd om ons heen. Het niveau daarvan ligt ruim binnen ‘natuurlijke’ normen. Maar soms komt daar verandering in. Een ongeluk in een kerncentrale bijvoorbeeld, die de vraag oproept of de straling om ons heen is toegenomen. Of een vreemd antiek voorwerp waarvan je je afvraagt of het van radioactieve materialen is gemaakt. Beide situaties vragen om een meetinstrument waarmee je radioactiviteit kunt meten. De GMC-300E Plus is dan een handig apparaat.
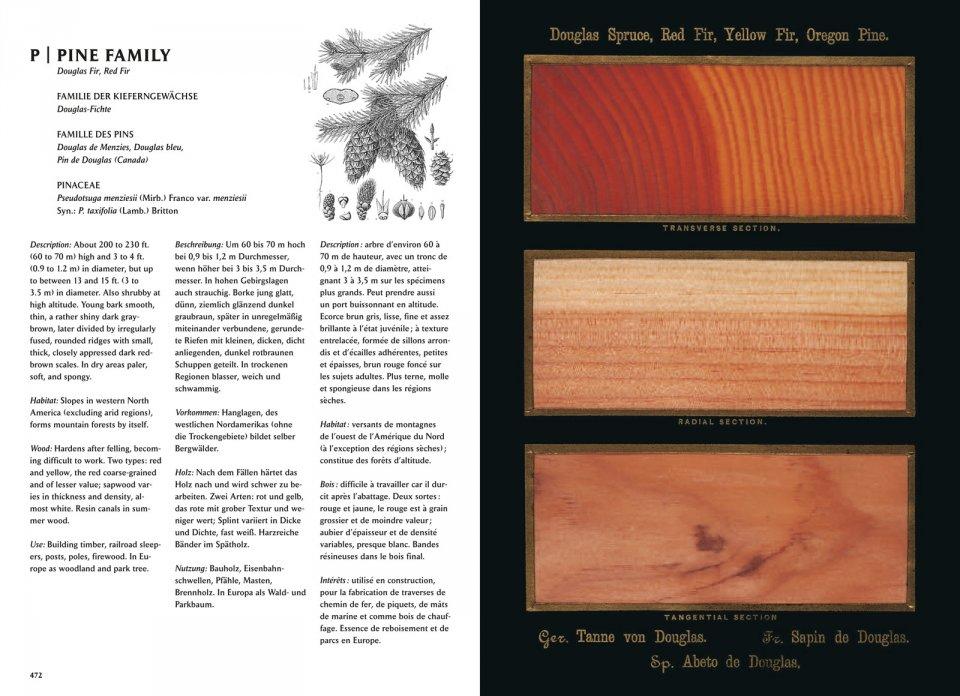
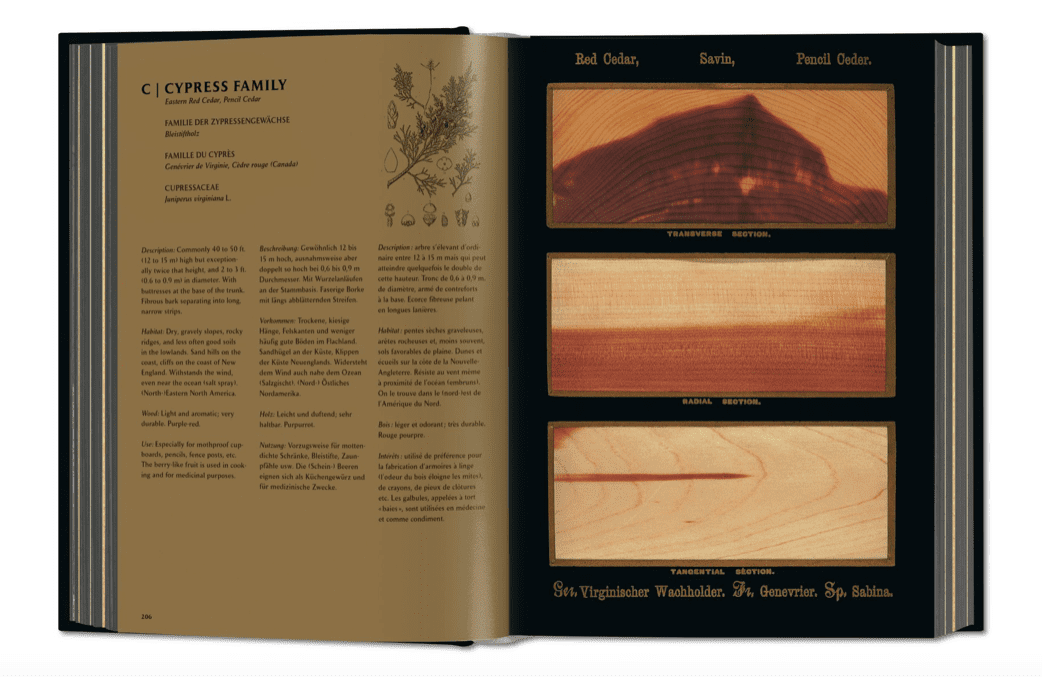
The American Woods is een 14-delige uitgave van Romeyn Beck Hough uit 1888 met alle Amerikaanse houtsoorten die er hebben bestaan. Van de houtsoorten zijn echte voorbeelden opgenomen; stukken fineer die op kartonnen platen waren gelijmd en waren voorzien van bijschriften. Taschen heeft de 14 delen gefotografeerd en in één boek ondergebracht: The Woodbook. De houtsoorten zijn per boomfamilie gesorteerd en voorzien van een voor-, zij- en bovenaanzicht van een balk gemaakt van de specifieke boom.
Voorbeeld van een houtsoort in The Woodbook
Bomen zijn gesorteerd op Latijnse familienaam en vervolgens op geslacht (genus). De Engelse, Duitse en Franse familienamen zijn hier als bijschrift aan toegevoegd. Zo vinden we de Amerikaanse witte eik als Fagaceae Quercus Alba L. in het boek, met als onderschrift de familienaam Beech (Buchengewächse, chêne et hêtre) en geslacht White Oak (Weiße-Eiche, chêne blanc).
De index is goed, alle varianten op familie- en geslachtnaam zijn eenvoudig te vinden. De sortering en bundeling op familienaam is ook heel praktisch. Als Nederlandse gebruiker heb ik echter een probleem met The Woodbook: in Nederland voor komende houtsoorten zijn niet allemaal terug te vinden in The Woodbook. De houtfamilie komt wel voor, maar Europese geslachten komen slechts ten dele in Amerika voor. Andersom bevat The Woodbook ook veel bomen die we in Nederland niet kennen (en in Amerika soms wellicht al zijn uitgestorven). Een voorbeeld hiervan is de houtsoort op de getoonde afbeelding van het boek: de Cypress family, met als onderschriften Eastern Red Cedar en Pencil Cedar zouden wij naaldhout noemen en daarbij waarschijnlijk verwijzen naar coniferen of sparren.
Enige vertaling is daarom wel handig. Hieronder een praktische lijst met in Nederland voorkomende houtsoorten met familienaam, handelsnaam (als het gaat om hout dat een functionele functie heeft) en een verwijziging naar The Woodbook (als de houtsoort in het boek voorkomt). Overigens is de wikipediapagina over houtsoorten een handige hulp in dit verhaal. Ik houd deze pagina zelf ook bij.
Nederlands hout
Wetenschappelijke naam
Nederlandse benamingen
Engelse benamingen
Handelsbenamingen
The Woodbook
Pinaceae Pinus sylvestris; P. risinosa
Grove den (p. sylvestris)
European Redwood, Scots Pine, Baltic Pine, Riga Pine, Norway Pine, Mongolian Pine, Scotchs Fir; Red Pine.
Grenen
(538); 538
Pinaceae Pinus echinata; P. palustris
Moerasden (p. palustris)
Yellow Pine; Southern Pine, Southern Yellow Pine
Amerikaans Grenen
512; 528
Pinaceae Pseudotsuga menziesii
Douglasspar
Douglas Spruce, Red Fir, Yellow Fir, Oregon Pine
Douglas hout
556
Fagaceae Quercus robur
Zomereik
European Oak, English Oak
Europees Eiken
(232)
Fagaceae Quercus alba
Amerikaanse Witte Eik
White Oak
Amerikaans Wit Eiken
232
Pinaceae Picea abies; P. engelmannii
Fijnspar (p. abies)
Norway Spruce, European Spruce; Engelmann Spruce, Rocky Mountain Spruce
Vuren
(488); 488
Meliaceae Swietenia mahogany
Amerikaans mahonie
Mahogany, Madeira-wood
Mahonie
398
Rosaceae Prunus avium; P. serotina
Zoete kers
Ox-hears Cherry, English Cherry; Wild Black Cherry
In de zomer van 1994 studeerde ik af aan de Rijkshogeschool Groningen. Ik woonde in een studentenhuis in de stad Groningen en mijn huisgenoot had ondertussen een baan aangenomen. Zelf wist ik nog niet wat ik wilde gaan doen en weifelde tussen een technische functie bij de politie in Driebergen, ‘iets met elektronica’, misschien toch verder studeren, of werken als software engineer. Ik had net mijn studielening afbetaald met de verdiensten uit mijn bijbaantje en had niet al te veel reserves meer. Toch had ik ook niet al teveel zin om me al aan een baan te verbinden en met vers afgeronde studies Elektronica en Informatica, een dubbele ingenieurstitel op zak en net 5 jaar ervaring in een elektronica-onderdelen-en-ontwerp-zaak jeukten mijn vingers om iets met die opgedane kennis te doen.
De leerlingen van Frankenstein
Mijn studies Elektronica en Informatica lagen op een pad die van een afstandje gezien althans zouden moeten leiden tot ‘iets met robots’. Ik ben altijd zeer geïnteresseerd geweest in onderzoek naar kunstmatige intelligentie en huishoudelijk toe te passen ‘robothulpjes’. Ik las in de jaren ’80 het boek De leerlingen van Frankenstein, een verslag van een generatie onderzoeksstudenten die bezig waren met het realiseren van ‘kunstmatige intelligentie’ en veel van de experimenten waren goed na te bootsen met de toenmalige thuiscomputers, hetgeen ik vaak en veelvuldig deed. Ik kon toen al goed voorstellen dat ik hier onderdeel van ging uitmaken, maar werkend vanaf een breder pallet dan ‘de leerlingen’ deden. Ik heb maanden besteed aan het nadoen van de onderzoeken en kwam tot de conclusie dat voor beperkte robothulpjes die zouden moeten opereren in een heel afgebakende omgeving al die complexiteit niet nodig zou moeten zijn. Hoewel ik de oplossing toen nog niet zag, was ik ervan overtuigd dat autonome robots weinig, maar vooral praktische intelligentie nodig hadden.
Mobile Robots
In het jaar voordat ik afstudeerde hadden Jones en Flynn het boek Mobile Robots: Inspiration to Implementation uitgebracht; een prachtig hardcover boek vol foto’s en inspirerende beschrijvingen over de elektronische en technische aspecten van mobiele robots. Met mijn vijf jaar onderdelenervaring en studies Elektronica en Informatica vond ik het boek aan de ene kant verhelderend maar aan de andere kant teleurstellend: Jones en Flynn waren professor en onderzoeksassistenten van het MIT in Cambridge MA met jarenlange ervaring maar de vindingen en verhandelingen in het boek lagen niet ver van mijn eigen ideeën en ervaringen af. Sterker, ik dacht zo her en der nog wel wat te kunnen verbeteren aan hetgeen ik las en probeerde me voor te stellen hoe een gesprek tussen mijzelf en Jones, Flynn en hun mentor Rodney Brooks over mogelijke verbeteringen zou verlopen.
Al filosoferend bedacht ik me dat ik net zo goed zelf eens zo’n autonome, mobiele robot zou kunnen bouwen om te laten zien hoe het ook kon en in het Nederlandse maandblad Elektuur, of zelfs de internationale Elektor kunnen publiceren. Het beste dat er in Nederland op dat gebied tot dan toe was, waren de robotmuis Willie van Steven Bolt (gepubliceerd in het maandblad Kijk), een prachtige constructie met hele basale elektronische componenten, en een Fischertechnik BBC robot die er fantastisch en hoogtechnisch uitzag, maar in functie maar weinig meer kon dan stapsgewijs op een tafel bestuurd worden met een BBC homecomputer. Beide leuke vindingen, die in de praktijk maar weinig weghadden van autonome robots die een rol of functie in een huishouden zouden kunnen hebben. Een klein klusje, zoals rommeltjes van de vloerbedekking verzamelen, zou toch niet teveel gevraagd hoeven zijn. Maar op z’n minst een zelfstandig werkend, niet al teveel aandacht benodigde ‘huisrobot’ vormen. Daar zou best interesse voor kunnen zijn in Cambridge, MA. En er was bij het MIT interesse in internationale onderzoeksstudenten voor 2, 3 of 6 maanden voor een veelheid aan onderwerpen. Maar hoe kom je daar, hoe betaal je dat? Misschien zou het ontwerp van de robot iets kunnen opleveren? En had Elektuur niet recentelijk een oproep staan voor technisch hoogstaande ontwerpen waarvoor een aardige beloning in het vooruitschiet werd gesteld? Hmm.
Vehicles
Ik had tot aan 1994 veel gelezen over autonome voertuigen en was er in die tijd van overtuigd, dat intelligentie niet ’top down’ maar juist ‘bottom up’ geconstrueerd moest worden. Ik werd hierbij enerzijds geïnspireerd door de tientallen jaren aan boeken en artikelen die ik had doorgenomen waarin ‘kunstmatige intelligentie’ vooral bestond uit voorgeprogrammeerde, truukjes uithalende lange stukken software die vooral de waardering van de makers zelf en niet zozeer van het grote publiek trokken. En het wilde er bij mij niet in dat je een complex programma nodig had voor iets eenvoudigs als een gesimuleerde muis of vogel. Ah, en anderzijds door de ideeën van Valentino Braitenberg.
Het boek Vehicles dat ik jaren daarvoor al had stukgelezen kwam me een heel eind tegemoet in de overtuiging dat intelligentie ‘bottom up’ ontstaat: Valentino Braitenberg liet van allerlei gedachtenoefeningen (geen van zijn ideeën waren direct praktisch uitvoerbaar, maar het scheelde meestal niet veel) voorbij gaan om aan te tonen dat complex gedrag heel goed kon ontstaan uit een klein aantal eenvoudige actie-reactie patronen die elkaar afwisselden als de sensorieke waarden voor een bepaalde actie hoger werden dan die van de andere. Ik was daarom vast van plan mijn tanden daar eens in vast te bijten: een simpele opbouw van een autonome robot met een eenvoudig doel in het bestaan, namelijk eenvoudig ‘zijn’: rondbewegen, reageren op de omgeving, op zoek naar licht of andere stimulae en op z’n tijd een elektrisch hapje. En natuurlijk in de tussentijd iets doen wat handig was thuis, zoals prullen van de vloer oprapen.
In 1994 waren er vier grote barrières voor het realiseren van autonome mobiele robots: platform en aandrijving, een geschikte microcontroller, toepasselijke softwarearchitectuur en een slimme toepassing van voorgaande drie. Geen van de robots die ik tot dat moment had gezien scoorde positief op deze aspecten. Sommige robots hadden een compact platform maar hadden verder weinig praktisch nut, sommige hadden een grote, onhandige computer en in sommige literatuur werd ingegaan op mogelijke architecturen die vervolgens door niemand was geïmplementeerd. En geen van de mobiele robots die er waren gingen ook maar iets verder dan een voorgeprogrammeerde ‘vooruit’, ‘ontwijk muur’ en ‘volg lijn’. ‘Mobile Robots’ adresseerde elk van de barrières met uitgewerkte voorbeelden en verhalende inspiraties, met hybride op Lego gebaseerde platformen en kleine motoren, een 68HC11 microcontroller en een printplaat ontwikkeld door Fred Martin van datzelfde MIT en als softwarearchitectuur de door Rodney Brooks in 1985 ontworpen ‘subsumption architecture’. Uiteindelijk kwam het boek niet voorbij de laatste hobbel, een slimme toepassing, maar daar ging ik verandering in brengen.
Elektuur van april 1994
Elektuur had een paar maanden eerder in het aprilnummer van 1994 een 68HC11 processorkaart gepubliceerd. Een minimaal ontwerp waar niet al teveel aandacht aan besteed was, maar die me op allerlei manieren vreselijk aantrok: veel I/O lijnen, ingebouwde A/D omzetters, programmeerbaar in 68HC11 assembleertaal waar ik geen enkele ervaring mee had, een handig bordje dat genoegen leek te nemen met een forse variatie in voedingsspanningen, waaronder die van penlite accu’s en vooral mooi compact. Motorola had een faxnummer voor productaanvragen en stuurde diezelfde week via UPS een set databoeken met ondermeer de 68HC11 Reference Manual uit Amerika op zonder enige bijkomende kosten en D.I.L.-Elektronica in Rotterdam, met advertenties in de Elektuur, had kitjes van het Elektuurontwerp in de handel zodat ik na enkele dagen al met de controller aan de slag kon. Een gouden greep, zo bleek, want de 68HC11 microcontroller was bijzonder krachtig en flexibel in het gebruik. Het debuggen met mijn inderhaast samengestelde code stack was nog wel een dingetje: de code moest gecompileerd op de PC en gedownload met een wat rammelende seriële verbinding naar de controller; fouten in de software konden slechts met leds en afwijkend gedrag opgespoord. Met de kennis die ik nu heb, had ik daar eerst iets aan gedaan, maar alas. Trial and error in die tijd. Mijn idee was, dat dit controllerbordje onderdeel zou gaan uitmaken van een grotere printplaat met besturingslogica en sensoren, waar de schakeling van het bordje onderdeel van zou zijn.
Onderdelen van het Elektor 930123 68HC11 microcontrollerbordje
Voor platform en aandrijving had ik een drie-wielig mechanisme in gedachten, met aangepaste modelbouwservo’s als aandrijving. Wielen in het midden zodat het platform op de plaats 360º zou kunnen draaien, handig om een obstakel te ontwijken, en een steuntje aan de achterzijde. Ik wilde hier een zo eenvoudig mogelijke mechanische opbouw, immers, de zelfbouwers van Elektuur moesten er thuis mee aan de slag kunnen! En het moest ook voor mezelf betaalbaar blijven. De oplossingen die ik tot dan had gezien bestonden ofwel uit grote, dure stappenmotoren, ofwel uit speelgoedmotoren waarvan de snelheid slecht regelbaar was. Beide oplossingen vereisten relatief zware elektronica om door microcontrollers te kunnen worden aangestuurd. Het slopen van een modelbouwservo zodat een deel van de elektronica kon worden hergebruikt en de servo, overbrenging en al, als aandrijfmotor gebruikt kon worden, leek me een gouden vondst. Die links en rechts, en dan een miniatuur zwenkwieltje als stabilisator. Hoewel me daar een kogel van een computermuis voor ogen stond, kreeg ik dat niet met minimale middelen voor elkaar en daarom maakte ik een wieltje van de reserveonderdelen die bij de modelbouwservo’s meekwamen. Dit alles om nabouw door de lezers van Elektuur eenvoudiger te maken.
In restroperspectief heb ik voor de robot de volgende uitgangspunten en randvoorwaarden gehanteerd:
Compact ontwerp met alles op hetzelfde platform
Geen afstandsbediening: autonoom is autonoom
Gedrag is het gevolg van reactie op omgeving en interne waarden
Sensoren worden gevormd door bumpers (schakelaars), infrarooddetector, lichtdetectoren, bewegende warmtebronnen, geluid en batterijniveau
Actuatoren zijn twee servomotoren, een indicatieled en een pieper
Programma volgt een minimale implementatie
Een lage intelligentie zou complex gedrag niet in de weg moeten zitten
Maximaal een week of twee bouw- en programmeertijd
Met zoveel mogelijk bestaande middelen te realiseren
Goed publiceerbaar en herbouwbaar door een gemiddelde Elektuur-lezer
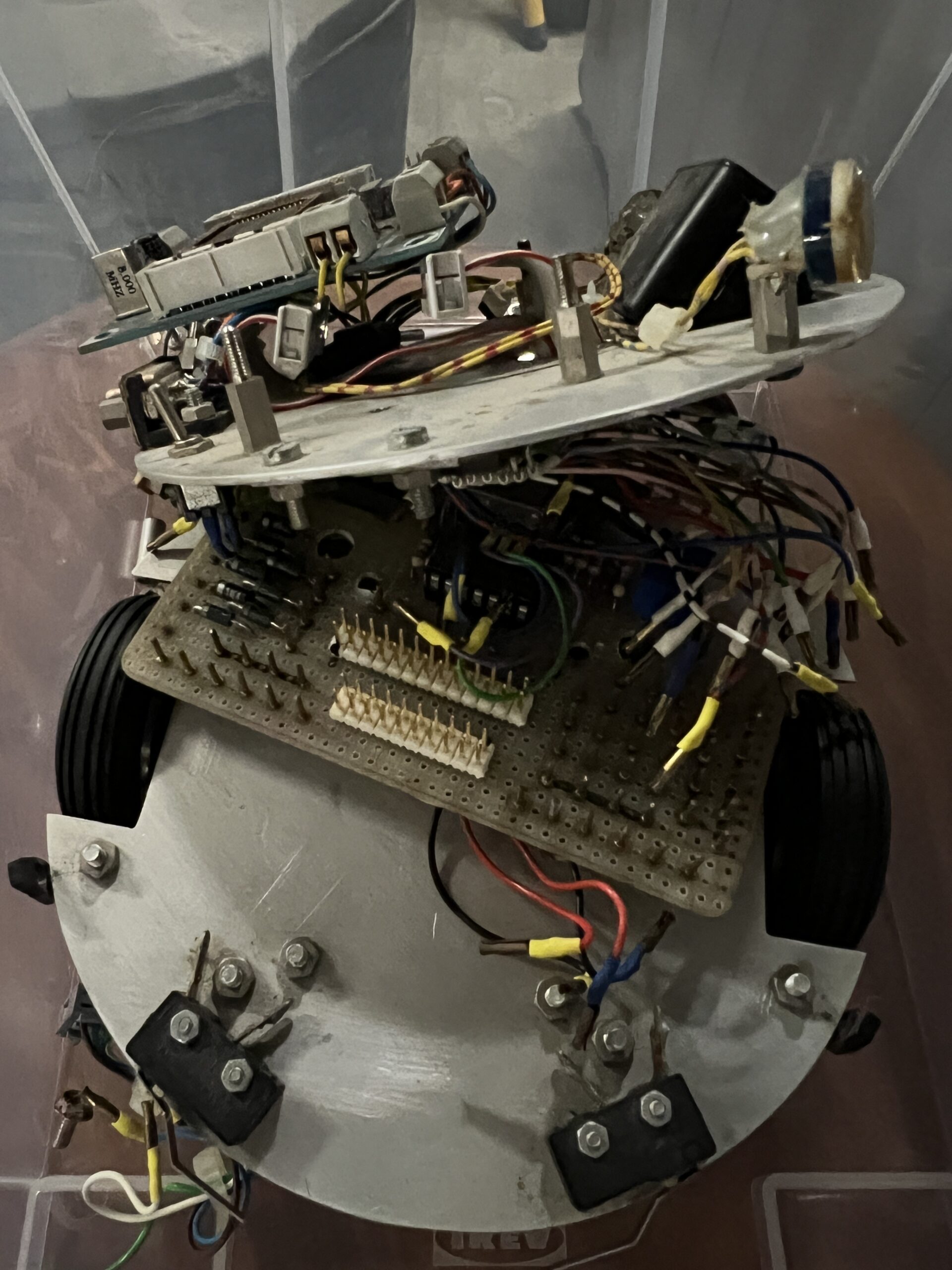
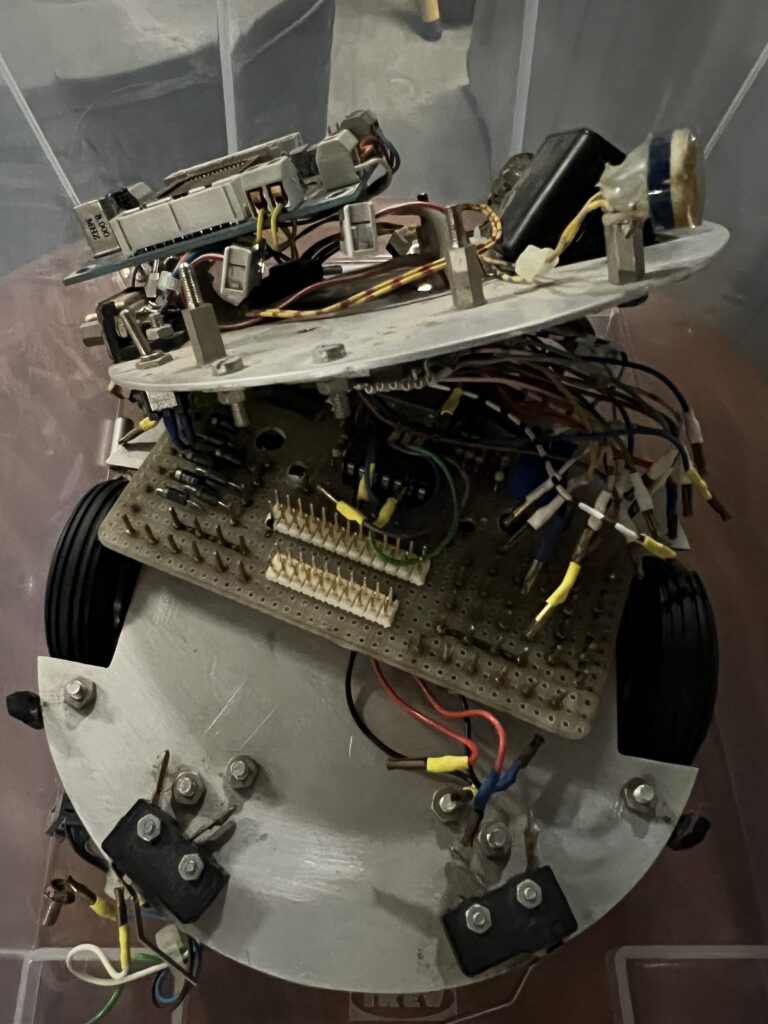
Ik had een plaat aluminium gekocht en gebruikte de grote woonkamer en de eettafel van het studentenhuis als tijdelijke werkplaats. Ik kwam erachter dat aluminium ook met wat geduld heel goed te bewerken is. Want dat was het mooie van de afgelopen studies geweest: er was altijd wel een werkplaats beschikbaar om iets te maken en die luxe had ik na het afstuderen niet meer. Een figuurzaag, een vijl en een schuurpapiertje waren echter het enige dat nodig was om een keurige cirkel uit te zagen, met uitsparingen voor de servomotoren. Gaten boorde ik uit de hand met een boormachine en alle montage gebeurde met M3 boutjes, afstandsbussen en hot glue. De robot bestond uit een basisplaat met de aandrijving, een printplaat met verbindingen en de accu’s, een tweede aluminum plaat en hierop de licht- en bewegingssensoren en de microcontrollerprintplaat. De printplaat was een stuk in vorm uitgezaagd gaatjesprint met voor een kapitaal aan connectoren, waarvan ik me voornam op die in de tweede versie te laten vervallen. Om de subsumption architecture in voldoende mate toe te kunnen passen had ik verschillende niveau’s van gedrag voor ogen, met verschillende mate van prioriteit, vanaf ’terugtrekken na een botsing’, ‘omzeilen bij nabijheid’, ‘op beweging afgaan’, ‘vraag om voeding’, ‘volg het licht’, ‘verberg voor licht’ en ‘ga op onderzoek uit’. Die gedragingen zouden voldoende moeten zijn om een complex gedragende autonome robot te maken die een hele dag voor zichzelf kon zorgen en aan het einde van de dag op zoek ging naar warmbloedige voorwerpen in het huis om om voeding (opladen) te zeuren.
De autonome mobiel robot, na verwijdering van de accu’s en 30 jaar na creatie. Zoveel herinneringen 🙂
Ik gebruikte CoralDRAW om de tekeningen van de aluminium platen, de plaats van de sensoren en de draadbomen mee te maken. Hoewel niet de handigste manier leverde het mooie tekeningen op. Ik had in die tijd de beschikking over een 80386 kloon met een Windows versie en een HP LaserJet 4L waarmee ik mooie documenten kon maken. De tekeningen vonden hun weg in een Word document, waarmee ik het artikel voor Elektuur aan het schrijven was. Parallel aan het ontwerpen van het voertuig ontwikkelde ik de tekeningen, schema’s en was ik begonnen met het schrijven van een verhandeling die ik “Evolutionairy Approach to Designing and Implementing Autonomous Robot Vehicles” had genoemd. Hierin deed ik een verhaal uit de doeken zoals deze door Braintenberg was voorgesteld, maar met de praktische invulling die ik op dat moment aan het opdoen was. Ik gebruikte de in mijn studies geleerde technieken voor het maken van terzake kundige rapporten: een goede titel, een inleiding met probleemstelling, 3 tot 5 onderwerpen (paste mooi, met theorie, hardware, softwarearchitectuur, software en praktijk) en een conclusie.
De keuken van het studentenhuis had een gladde zeilvloer, een groot venster en verschillende hoekjes en was het perfecte lab voor proefnemingen met het prototype van de robot. Na wat gesprekken met de redactie van Elektuur leek het erop dat het ontwerp precies in het plaatje van het elektronicatijdschrift paste en ik maakte me klaar om een printplaat te ontwerpen waarmee de grote hoeveelheid draden vervangen zouden worden. Nog wat extra dagen tekenwerk en de schema’s begonnen er goed uit te zien. Mijn onderzoeksrapport las plezierig en enkele van de ontwerpafbeeldingen deden de tekst goed. De software, het hart van het gedrag van de robot, begon aardig stabiel te worden en het gedrag van de robot begon plezierig onvoorspelbaar te worden, precies wat je verwacht bij complex gedrag, ondanks het feit dat het programma zelf compact en overzichtelijk was gebleven.
Omdat de druk om de huiskamer weer wat leefbaar te maken na een paar weken onafgebroken schrijven, werken en zagen wat hoger werd en omdat het meeste van de hardware wel zo goed als af was, maakte ik een grote schoonmaak en ruimde de kamer op. Alle tijdelijk in de huiskamer verzamelde gereedschap ging weer terug naar de knutselkast, restjes en de vele afdrukken van de listings en platformontwerpen gingen de papierbak ik en de mobiele robot kreeg een mooi plekje in de boekenkast. Omdat ik weken onafgebroken bezig was geweest, werd het ook tijd om eens weer buitenshuis te gaan kijken. Na een paar dagen deed ik een rondje door de stad, bezocht mijn ouders en pikte in de loop een interessant tijdschrift op, met een op de voorpagina vastgeplakte diskette met een Linux distributie waar je zo mee aan de slag kon. Leek me wel wat, ik had tijdens mijn studie wel met Xinu gewerkt (wat, vanaf de grond herschreven bedoel ik), maar Linux, dat was nieuw. Leuk, even iets anders. Weer thuisgekomen plaatste ik de diskette en startte de computer opnieuw op. Ik kreeg een prompt zoals de volgende:
Welcome to Linux!
Press Y to prep your disk or any other key to quit.
Mijn hart deed even een sprongetje, toen ik me realiseerde dat al mijn tekeningen, de broncode en eigenlijk al mijn studieresultaten en mijn mogelijke toekomst in de mobiele robotica op de harde schijf van de computer stonden. De omvang hiervan was net even wat meer dan er op diskettes pasten en ik had nog niet echt tijd gehad om een kopie te maken. Gelukkig kon ik de boel met Y afbreken en het later nog eens opnieuw proberen. Ik drukte op Y.
Welcome to Linux!
Press Y to prep your disk or any other key to quit.
Prepping disk C for Linux..
Tot de dag van vandaag ben ik er overigens van overtuigd dat ik de tekst zeer zorgvuldig heb gelezen en op N heb gedrukt , maar de feedback van een ieder waar ik het verhaal aan vertelde was toch wel in de zin van “weet je zeker waar je op drukte?” en ik weet het niet zeker meer, evenmin als ik nog weet welke Linux distro het betrof.
Mijn eerste gedachte was “wat een bijzonder geluid maakt dat opstarten van Linux” en als tweede zette ik de stroom van de computer uit, met de hoop nog iets van de schijf te kunnen redden. Maar niets hiervan: de schijf was in het geheel niet meer benaderbaar en alle data die erop had gestaan was verloren gegaan. Ik voelde de grond onder mij bewegen en mijn gedachten raasden naar de afspraak met Elektuur en de afspraak met de HCC Robotica Interessegroep die ik die week nog had om de robot te demonstreren. De rest van de middag bestond uit het verzamelen van hetgeen ik nog digitaal en op papier beschikbaar had. Ik verwenste mijn grondige schoonmaak eerder die week en stelde vast dat niets van de vuilnis en papierbak nog te redden was. Belangrijker dan de tekeningen was nog de met veel moeite ontwikkelde programmatuur voor de microcontroller: op de gecompileerde versie na die nu in de 68HC11 zat opgeslagen had ik geen enkele vorm van broncode meer. Onderaan de streep had ik een mooi uitziende autonome mobiele robot, die een grote groep hobbyisten zou inspireren tot toekomstige producten, maar niets om Elektuur te overtuigen of als toelatingsproject voor het onderzoeksteam van het MIT te kunnen dienen. Ik heb echter niet lang bij de pakken neergezeten en de week erop ben ik als beroepsprogrammeur bij een lokaal softwarebedrijf aan de slag gegaan. Het duurde tot zeker 1999 voordat ik me weer enigszins interesseerde voor mobiele robots. In de tussentijd hadden Flynn, Jones en Brooks niet stilgezeten en hadden hun eerste grootschalig commerciële product, stofzuigrobot Roomba als eerste consumentenrobot op de markt gebracht, met daarin de door Jones ontwikkelde hardware en door Brooks ontwikkelde subsumption architecture.
Tien jaar terug was er een race om een zo klein mogelijke laptop te maken. Een aantal fabrikanten zagen hier de mogelijkheid in om een zo goedkoop mogelijke laptop te produceren, anderen hadden het idee om een sjieke minilaptop te maken voor een premium prijs. Alle laptops deden het echter met een Intel Atom processor, speciaal door Intel bedacht om vooral niks te presteren en weinig te kosten.
Toevallig ben ik in het bezit van twee van deze staaltjes van technisch vernuft: de HP Mini 210 en de Sony Viao P21. Beide met een Intel Atom inside, maar er zijn verschillen.
Toshiba MK8025GAL 80 GB HDD 4200 rpm ZIF PATA 1,8 inch
Videochip
Intel GMA 3150
Intel GMA 500
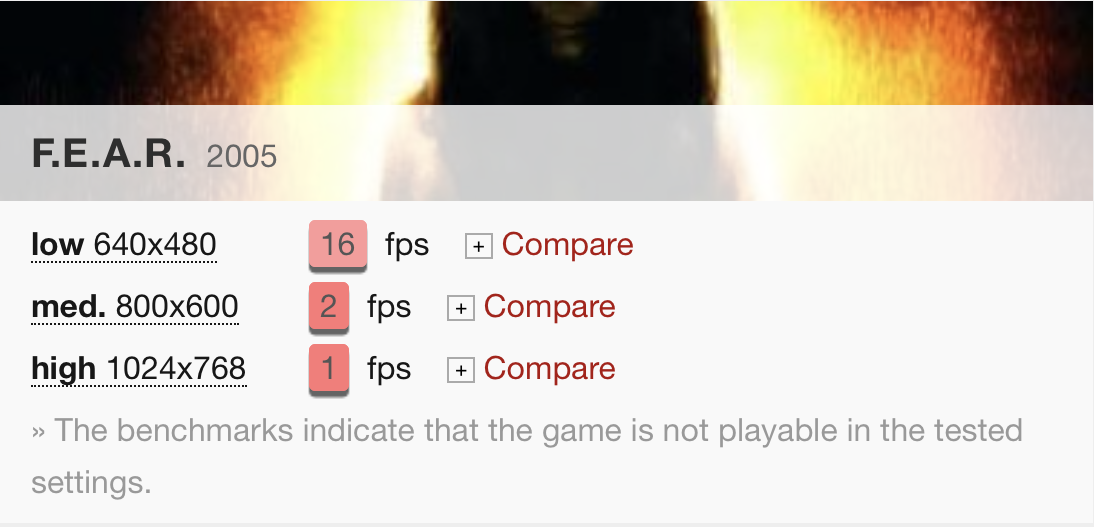
Game prestaties
Beeldscherm
10 inch 10:9 1024×600/ 1366×768 pixels
8 inch 25:12 1600×768 pixels
Audiochip
HD audio, Beats driver, stereo luidsprekers
Realtek ALC662, stereo luidsprekers
Audio in
Ingebouwde microfoon
Ingebouwde microfoon
Schermcamera
640 x 480 pixels
Aansluitingen
Wifi 802.11 b/g/n, ethernet, 2 x USB, VGA, koptelefoon, SD-kaartlezer
Wifi 802.11 b/g, 2 x USB, koptelefoon, SD-kaartlezer, Memory-Stick kaartlezer, SIM kaart, netwerk- en videoadapteraansluiting
Meegeleverde accessoires
Netadapter
Netwerk- en VGA dock, netadapter
De Sony P-series is tergend traag. Toch is er nog enigszins te werken met de P-series, zolang het niet op schijfbewerkingen aankomt. Zodra er gelezen of geschreven moet worden naar de schijf zijn er zo minuten voorbij. De webcam is aanwezig, en een programma als Microsoft Teams is te installeren en te gebruiken, maar met twee of drie frames per seconde, zonder verbindingen van buitenaf.
Ook de HP Mini 210 is erg langzaam: schermhandelingen zijn langzaam, opstarten van applicaties gaat langzaam, opstarten duurt en duurt. Toch gaat het sneller dan bij de Viao, maar op een andere manier. Schermactiviteiten lijken langzamer dan de Viao, schijfhandelingen een stuk sneller. Ik zal er eens een SSD inproppen, kijken hoe dat de boel versnelt.
Als je binnen je familie, studiegenoten of collega’s lootjes wilt trekken voor Sinterklaas loop je tegen het probleem aan dat mensen zichzelf niet mogen trekken. Ook wil je soms dat sommige mensen elkaar niet trekken. En terugleggen van lootjes is niet altijd handig als mensen niet bij het trekken zelf aanwezig kunnen zijn. Een online mechanisme kan dan een oplossing zijn, maar het is even gemakkelijk om dit toch met papieren lootjes te doen.
Wat je doet is voor iedere deelnemer een lootje schrijven. Vervolgens leg je de lootjes in een vierkant. Je maakt groepen per rij of kolom, en schrijft naast de naam per groep een letter, “A”, “B”, enzovoorts. Neem op een apart lijstje over, welke naam bij welke groep hoort. Zorg ervoor dat er tenminste drie of vier mensen in iedere groep zitten, maar het precieze aantal leden per groep maakt niet uit. Vouw de lootjes vervolgens dicht en neem de letter van de groep over op de buitenkant van het lootje.
Neem per groep nu een beker of kommetje en stop hier alle lootjes per groep in. Laat iedereen nu een lootje kiezen, maar men mag niet kiezen uit de beker of kommetje waar de lootjes inzitten voor zijn of haar eigen groep. Dat gaat het best als de organisator de bekers waar wel uit gekozen mag worden presenteert. Deelnemers die niet aanwezig zijn krijgen een lootje opgestuurd, waar dan niet de groep op staat waar ze zelf in zitten.
Probleem opgelost: de organisator weet niet wie wie heeft getrokken, mensen kunnen niet zichzelf trekken en je kunt voorkomen dat bepaalde deelnemers elkaar kiezen door ze in dezelfde groep te zetten.
Ik heb een oplaadpunt van 7kW (3 x 10A x 230V) in de garage. Mijn Tesla model 3 heeft een accupakket van een kleine 80kWh, die we normaliter tot 90% opladen voor een range van 450 kilometer. Het laden duurt thuis dan ook maximaal 10 uur als de accu helemaal leeg is. Meestal gaat het laden veel sneller, wanneer de accu slechts deels is ontladen. Als je op pad bent en wilt laden dan ben je aangewezen op publieke- en/of voor jou toegankelijke laders. Daar zijn er veel van, maar ze zijn niet allemaal hetzelfde. En niemand wil 10 uur wachten voor z’n autoaccu weer is opgeladen. Hoe werkt dat dan? Slim plannen, zo blijkt.
Laten we als voorbeeld wat langere ritjes nemen die ik onlangs deed. Het laden onderweg vereist wat voorbereiding, de ene keer meer dan anders. Het is goed om te weten dat we met 90% van 80kWh in theorie ongeveer 450 kilometer kunnen afleggen. Per 100 kilometer moet er (0,9 x 80 / 450 * 100 =) 16kW worden geladen. Verder is het goed om te weten dat je bij oplaadpalen betaalt met een chip van bijvoorbeeld E-flux, ANWB, VanDeBron (tip!) of TravelCard. Een beginnend elektrisch rijder heeft ze allemaal bij zich. De prijs per kWh is ongeveer 22 cent. Per 100 kilometer betaal je daarom ongeveer 16 x 22 = €3,52.
Werkdag in Zwolle (afstand 100 kilometer)
Aanpak: met 90% opgeladen accu van huis vertrekken. Ter plaatse weer volledig opladen. Dan thuis weer aan de lader.
Het plan Voor deze werkdag heb ik uitgezocht waar ik de auto zou gaan parkeren tijdens de werkdag. Dit bleek te kunnen voor de parkeergarage van het Engie gebouw, Grote Voort 291 in Zwolle. Met Oplaadpalen.nl zie je op dit adres dat hier twee opladers van 4kW van EV-box staan. Het opladen hiermee zou ongeveer 4 uur gaan duren, wat prima is voor een werkdag van 8 uur.
Twee openbare laadpalen op locatie in Zwolle. Beide palen waren de hele werkdag bezet
De praktijk Ter plaatste werd ik verrast door de aanwezigheid van twee 66kW snelladers en iets van twintig 11kW oplaadpalen ín de parkeergarage (en inderdaad twee openbare laders voor het pand, die beide in gebruik waren). Bij de receptie boden ze ook nog eens het gebruik van de ‘gratis druppel’ aan, waarmee ik kostenloos kon laden. Aan de aanwezigheid van deze laadpalen wordt geen ruchtbaarheid gegeven, zo lijkt het. Ook niet aan het feit dat het laden gratis is.
Twee snelladers en een groot aantal vrije laadpalen in de parkeergarage van Engie
Omdat ik de rit naar Zwolle vaker doe is dat een mooie gelegenheid om het verbruik (in kWh) per rit met elkaar te vergelijken. In de tabel hieronder ben ik uitgegaan van een accucapaciteit van 78 kWh en een opgegeven bereik van 500 km:
Buiten- temp.
Afstand
Tijd
Max snelheid
Verbruik
Totaal verbruik
Bereik (berekend)
Percentage opgegeven bereik
16 ˚C
106,1 km
1:32
130 km
162 Wh/km
17,188 kWh
481 km
96,2 %
9 ˚C
105,0 km
1:01
130 km
186 Wh/km
19,530 kWh
419 km
83,8 %
14 ˚C
105,4 km
1:06
130 km
176 Wh/km
18,550 kWh
443 km
88,6 %
3 ˚C
101,9 km
1:29
130 km
222 Wh/km
22,622 kWh
351 km
70,2 %
3 ˚C
105,3 km
1:23
130 km
209 Wh/km
22,008 kWh
373 km
74,6 %
4 ˚C (v)
105,4 km
1:18
100 km
176 Wh/km
18,550 kWh
443 km
88,6 %
1 ˚C (v)
105,3
1:23
130 km
209 Wh/km
22,008 kW
373 km
74,6%
Met het hockeyteam naar Rotterdam (afstand 242 kilometer)
Aanpak: met 90% opgeladen accu van huis vertrekken. Met ca. 20% accucapaciteit aankomen in Rotterdam. Een uurtje laden bij de snellader in de buurt. Hockeyteam mee terug naar huis. Aankomen met ca. 20% restcapaciteit. Dan thuis weer aan de lader.
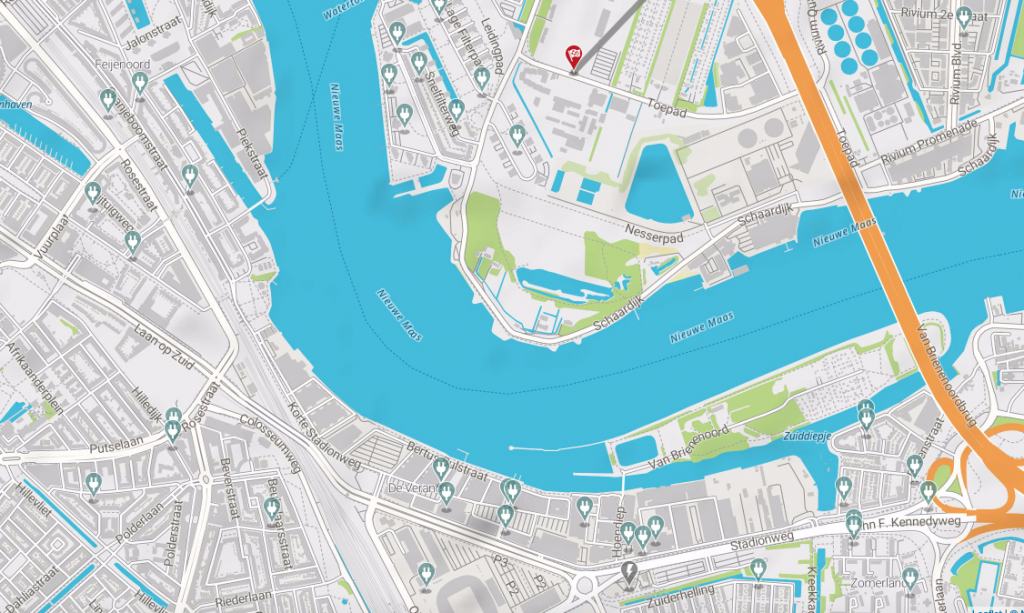
Het plan Voor deze rit heb ik eerst eens goed gekeken naar de precieze afstand naar het hockeyveld aan Toepad 95 in Rotterdam. 242 kilometer is te doen met een accucapaciteit van 450 kilometer, maar als je een beetje om moet rijden, of meer stroom verbruikt, dan kom je met een aardig lege accu aan. Met ABetterRoutePlanner.com vond ik een dubbel uitgevoerde 50kW snellader bij Shell Recharge Stadionweg Rotterdam, ongeveer 10 minuten rijden verwijderd van de hockeyvelden. Het laden zou iets minder dan een uur moeten kosten. Overigens vind je op de website van het Shell station geen snelladers genoemd.
Hockeyveld (rode marker midden boven) en 50kW snellader (grijze marker met bliksemschicht in het midden, onder de Nieuwe Maas). Let op het grote aantal publieke laadpalen (blauwgroene markers met stekker), die allemaal maximaal 11kW leveren
De praktijk Ik kwam bij de Shell Recharge aan met een restcapaciteit van 112 kilometer, een kleine 100 kilometer minder dan de verwachte 208 kilometer. Er moest zo’n 54kW bijgeladen worden en het laden ging 1 uur en 10 minuten in beslag nemen. Iets langer dan gepland. Ik had een uurtje uitgetrokken vóór de hockeywedstrijd zou starten, dus ik twijfelde nog om het laden voortijdig af te breken. Maar ik wilde ook niet nog eens op de terugweg laden en met het hockeyteam op een laadplek wachten. Ik heb er daarom maar voor gekozen de eerste tien minuten van de wedstrijd te missen. De Shell had een inpandige Starbucks, heb mijn meegebrachte broodje met een lekker kopje koffie verorbert. Een retourtje Rotterdam kost op deze manier €23,76 aan elektriciteit.
Bij aansluiten van de laadstekker zie je hoeveel tijd het kost om te laden. Dit was een nauwkeurige inschatting: ik had 1 uur en 10 minuten pauze
Winkelen in Oldenburg (140 kilometer)
Aanpak: van Groningen naar Einkaufsland Wechloy, daar laden, vervolgens naar de binnenstad en weer terug naar Groningen. Plan B is om heen en weer te rijden zonder tussentijds bijladen.
Het plan We gaan naar Einkaufsland Wechloy, naar de grote sportwinkel en de FamilaXXL, op ongeveer 130 kilometer vanaf Groningen. Met Oplaadpalen.nl vind ik een wat verstopte 50kW snellader achter de MediaMarkt, pal naast de winkel waar we naar toe willen. Het bijladen van de 130 kilometer zou nog geen 25 minuten moeten duren, past mooi in ons winkelschema.
De groene marker geeft de 50kW snellader aan met twee aansluitingen, op de hoek van het pand van de MediaMarkt. De blauwe marker is een 40kW enkele lader
De praktijk We vinden de snellader inderdaad pal naast de ingang van de MediaMarkt. We hadden ‘m niet gevonden als we niet van te voren hadden geweten dat de lader er was. Twee plekken vrij. De TravelCard chip doet het prima in Duitsland. De accu van de auto was na 25 minuten weer vol; terwijl we nog bij ons eerste winkeladresje waren kregen we een appje van de auto. Een half uur later zijn we doorgereden naar de FamilaXXL, en van daaruit via de binnenstad van Oldenburg weer terug naar Groningen. Het retourtje Oldenburg kostte €9,86 aan elektriciteit.
Rondreis van Groningen naar Rotterdam, via Texel terug naar Groningen (609 kilometer)
Aanpak: van Groningen naar een Rotterdam, daar laden. Van Rotterdam naar Texel. Daar laden. Van Texel terug naar Groningen. Thuis weer aan de lader.
Het plan Ik ga zoonlief en een kameraadje vanuit Groningen oppikken in Rotterdam. Bij aankomst in Rotterdam eerst snelladen bij Fastned, Rijksweg A13 200 in Delft, op 254 kilometer van Groningen met een 350kW snellader. De benodigde (2,54 x 16 =) 41kW bijladen zou nog geen 7 minuten hoeven te duren! Dan doorrijden naar het hockeyveld, Hazelaarweg 2 in Rotterdam, op een kleine 10 kilometer afstand. Na het inladen van de jongens vandaar de 150 kilometer naar de veerboot op Havenplein 3 in Den Helder. Met een snellader de auto op vakantiepark De Krim, 20 kilometer verderop, opladen. De volgende dag weer naar Groningen, 175 kilometer rijden. Daar de auto thuis aan de lader zetten.
De praktijk Bij Fastned waren 3 opladers: eentje van 50kW en twee van 350kW. Die van 350kW waren bezet. Maar na een paar minuten ging de Hyundai Kona-taxi er vandoor en kon ik laden. Die 350kW was ook te mooi om waar te zijn: de Tesla Model 3 wilde met maximaal 116kW laden. Er moest 280kM worden geladen voor de 254 kilometer die ik had afgelegd. Duurde een half uur.
Met de hockey-boyz naar Leiden en weer terug (217 kilometer)
Aanpak: van Groningen naar Oegstgeest. Daar iets, maar niet per sé helemaal vol, bijladen zodat er bij thuiskomen nog tenminste 25% accu over is.
Het plan We gaan met de hockeymannen vanuit Groningen naar sportpark De Krogt, Hofbrouckerlaan 55 in Oegstgeest, een reis van ongeveer 217 kilometer. Naar verwachting (zie tabel bij ‘Werkdag in Zwolle’ hierboven, uitgaande van een buitentemperatuur van 3 ˚C) neemt dat ongeveer 44 kWh in beslag.
Als we starten met een 90% gevulde accu dan staat de accu bij aankomst in Oegstgeest op 26 kWh, ofwel 34%. Om weer thuis te komen met 25% moet de accu worden bijgeladen tot 64 kWh, ongeveer 82%. Er moet dus 38 kWh geladen worden.
Met de openbare Allego lader van 11 kWh aan Hofbrouckerlaan 35 duurt dat tenminste 4 uur. Daar willen we niet op wachten: we zijn hooguit 2 uur in Leiden.
De snellader van Fastned aan Elsgeest A44 is een klein stukje rijden verderop, maar doet het laden met 50 kWh in minder dan een uur.